- Admissions
- Academics
- Research Office
- Student Life
- News & Events
- Outreach
- About
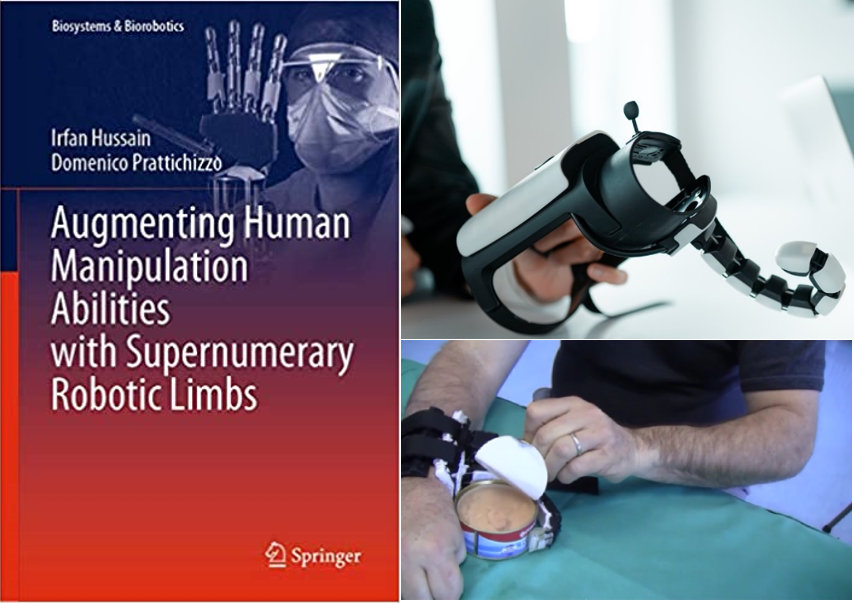
Dr. Irfan Hussain is an Assistant Professor in Robotics and Mechanical Engineering at Khalifa University, Abu Dhabi, UAE. He is the author of one book, more than 70 articles, and holds 3 inventions. He is the Associate Editor of the proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science. He is also the Research Topic Editor for "Wearable Robots and Sensorimotor Interfaces: Augmentation, Rehabilitation, Assistance or Substitution of Human Sensorimotor Function" (ID 21096) in Frontiers in Neurorobotics. Additionally, he is the Guest Editor for the Special Issue "Design and Development of Vision-Based Tactile Sensors," in Sensors (ISSN 1424-8220). He has served as an Associate Editor for IEEE/RAS ICRA-23, ICRA-22, ICRA-21, and RAS/EMBS BioRob-18.
Dr. Hussain received his PhD in Robotics from the University of Siena, Italy, and worked as a postdoctoral researcher at the Robotics Institute at Khalifa University of Science and Technology, Abu Dhabi, UAE. He was also a postdoctoral researcher at the Siena Robotics and Systems Lab (SIRSLab), Italy. He received his 2nd Level Master's degree in Automation and Control Technologies from Politecnico Di Torino, Italy, and an MS degree in Mechatronics Engineering from the National University of Sciences and Technology, Pakistan. He earned a BE in Mechatronics Engineering from Air University, Pakistan.
Dr. Hussain worked as a Research Assistant at Gyeongsang National University, South Korea, from 2012 to 2013, and as a visiting researcher at Centro Ricerche Fiat (CRF), Italy. He also served as Assistant Manager of Engineering at Trojans Pakistan from 2008 to 2011. His research interests include Marine Robotics, Healthcare Robotics, and Industrial Robotics.

Marine Robotics - KUCARS-T3
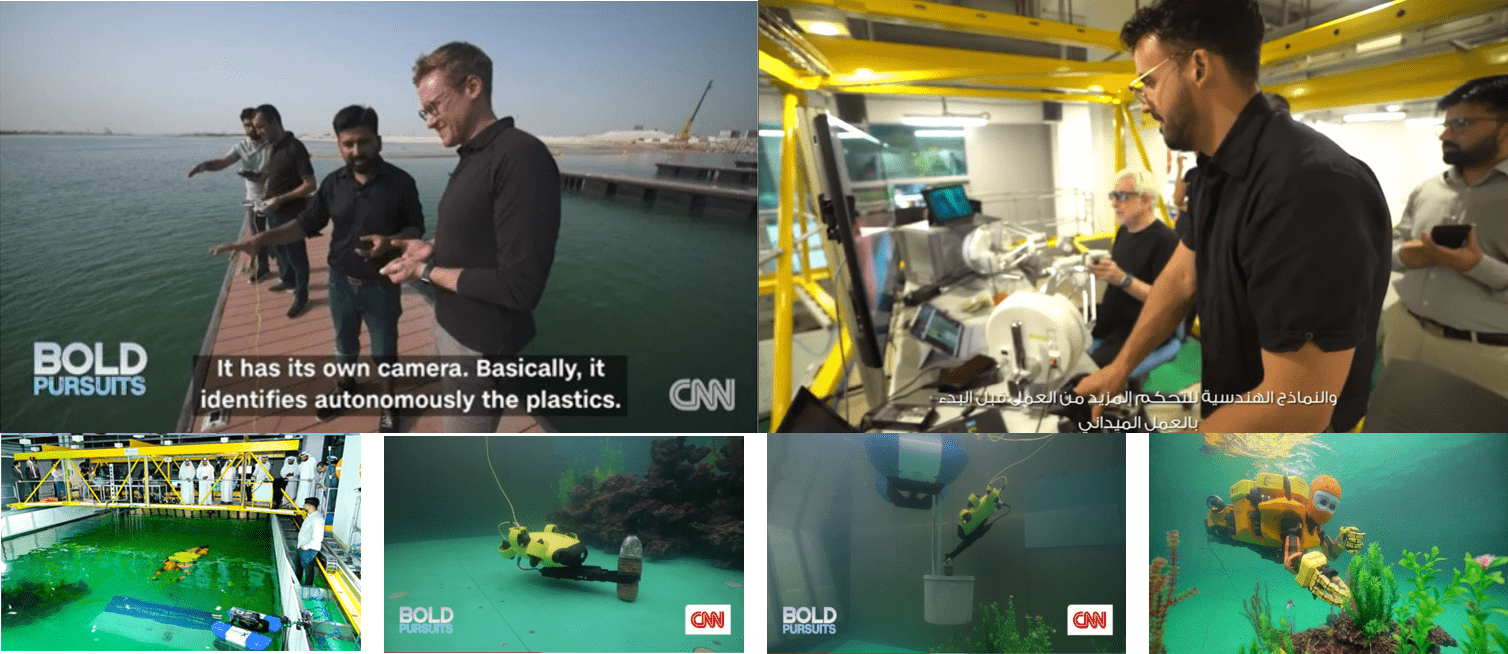
Our oceans offer immense opportunities yet face sustainability challenges due to environmental degradation. KUCARS Theme 3 focuses on robotic technologies for deep-sea monitoring and interventions, addressing complexities like currents, tides, and limited visibility. Underwater challenges include lack of GPS and difficulty in mapping using SLAM-based localization. Theme 3 aims to tackle these marine robotics research issues. Key objectives include: (O1) AI-driven navigation for underwater robots, (O2) AI-based marine environment mapping, (O3) multi-sensory active perception underwater, and (O4) algorithms for underwater grasping and manipulation.
MBZIRC 2023: The Mohamed Bin Zayed International Robotics Challenge - ASPIRE
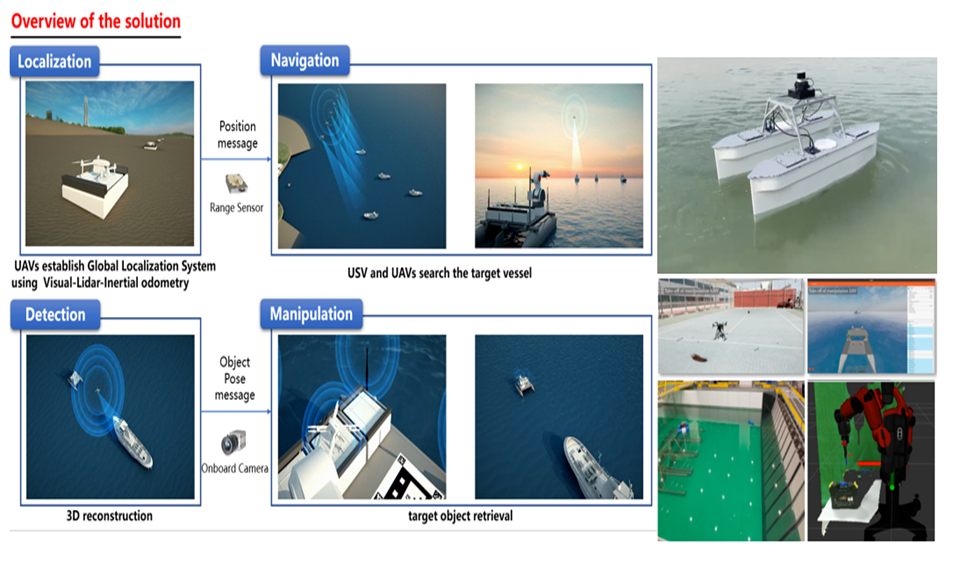
The MBZIRC Maritime Grand Challenge is focused on deploying robot technology for ensuring maritime security. The challenge involves a heterogeneous fleet of autonomous aerial and surface vehicles collaborating in a relatively large GNSS-denied environment along the coast of Abu Dhabi, to detect predefined targets and to retrieve predefined objects from the targets. This is a highly complex problem and the key technical challenges include:
We will use a robotic system consists of 20 UAVs and 1 USV (with robotic arm) to solve the MBZIRC 2024 Maritime Grand Challenge tasks. These will include several inspection UAVs (up to 10) to search the 10 square km area, in a formation, to detect the targets. One or more inspection UAV will also approach the target vessels to completes the 3D modeling. Once the targets are identified, the USV will navigate to the target vessel. A transportation UAV will take off from the deck of the USV to pick up the light object(s) on the target vessel using airborne vision and will return back to the USV deck to place the object(s). Two transportation UAVs will be used to manipulate the heavy object to the edge of the target vessel. The USV robot manipulator will then pick up the heavy object and place on the deck.

Autonomous Underwater Robotic System for Aquaculture Applications
The UAE is focused on meeting its growing demand for fish by expanding aquaculture through the development of fish cages and net pens in the sea. These enclosures require regular monitoring to ensure the well-being of the fish and the maintenance of the cages. Currently, this process relies on expensive divers and multiple remotely operated vehicles (ROVs). Our project aims to revolutionize aquafarm monitoring by developing an autonomous underwater robotic system. This system will integrate advanced computer vision techniques with ROVs to detect defects in fish nets and assess fish health. By enhancing the efficiency of monitoring, this innovative approach will contribute to the sustainability and profitability of the UAE's aquaculture industry.
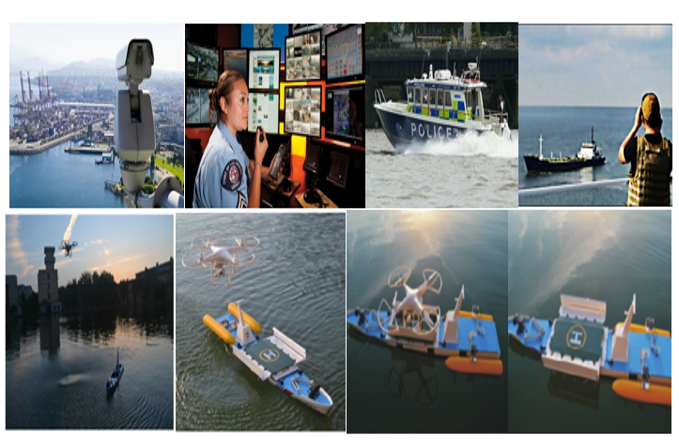
Autonomous Robotic Systems for Port Inspection - Chinese Ministry of Science and Technology
This project aims to enhance port security through the development of an autonomous inspection and surveillance system consisting of a USV (Unmanned Surface Vehicle) and multiple UAVs (Unmanned Aerial Vehicles). The USV focuses on water surface surveillance, while UAVs monitor airspace around the USV. Upon detecting any unusual activities, the system promptly alerts a central base station. The key hardware components include sensory-equipped USVs and UAVs, outfitted with cameras, laser range finders, and grippers. The project also focuses on software advancements, such as deep learning for activity recognition, path planning, collision avoidance, and autonomous landing and grasping techniques. The design phase leverages dynamic simulators like Gazebo and the Robot Operating System (ROS), with subsequent integration into real-world hardware systems.
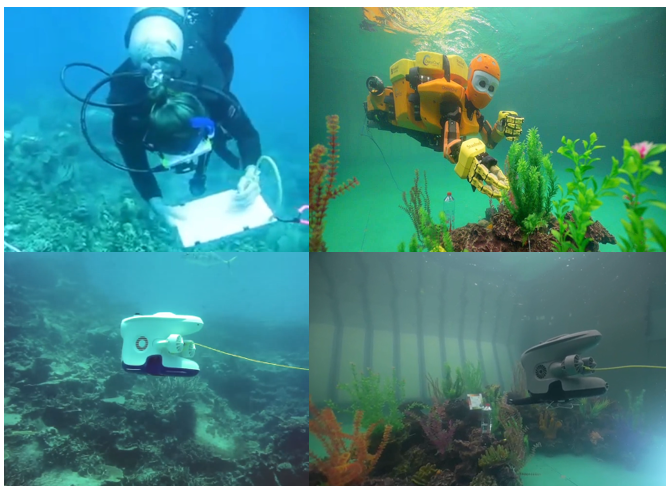
Autonomous Coral Reef Inspection - ENEC
Coral reefs are an important indicator of marine ecology health and are under unprecedented threats due to human activities including global warming, pollution, and damage from human activity. Traditional coral reef monitoring methods, which rely on human divers, are technically challenging and limited by the difficult environments in which they operate. The rapidly advancing field of marine robotics offers significant potential to improve reef monitoring by providing enhanced spatial and temporal coverage. However, current underwater robotics and sensor technologies are still in their early stages and lack the capability to achieve the desired monitoring precision. This project aims to advance marine robotics by extending their capabilities for comprehensive coral reef monitoring.
Khalifa University-KUCARS and Stanford University-SRL: Marine Robotics Research Collaboration
Our oceans represent both a vast wealth of opportunity and an immediate challenge in sustainability. As we seek to harness the ocean's resources, we confront environmental factors that threaten significant portions of its ecosystem. Addressing this, human endeavors must achieve two key objectives: developing technologies that allow us to perform essential tasks, such as construction, observation, and repair at ocean depths, and implementing strategies to correct and stabilize the underwater environment.
Khalifa University and Stanford University propose a collaborative effort to tackle these challenges by advancing marine robotic technologies capable of operating at significant depths. Our joint research will focus on two critical areas: (i) the development of marine robotics for environmental monitoring, critical infrastructure inspection, and intervention, including maintenance operations, and (ii) enhancing human-robot interaction capabilities through haptic interfaces integrated with embodied and computational intelligence. This collaboration aims to pioneer solutions that not only expand our operational capacity in marine environments but also contribute to the long-term sustainability of our oceans.
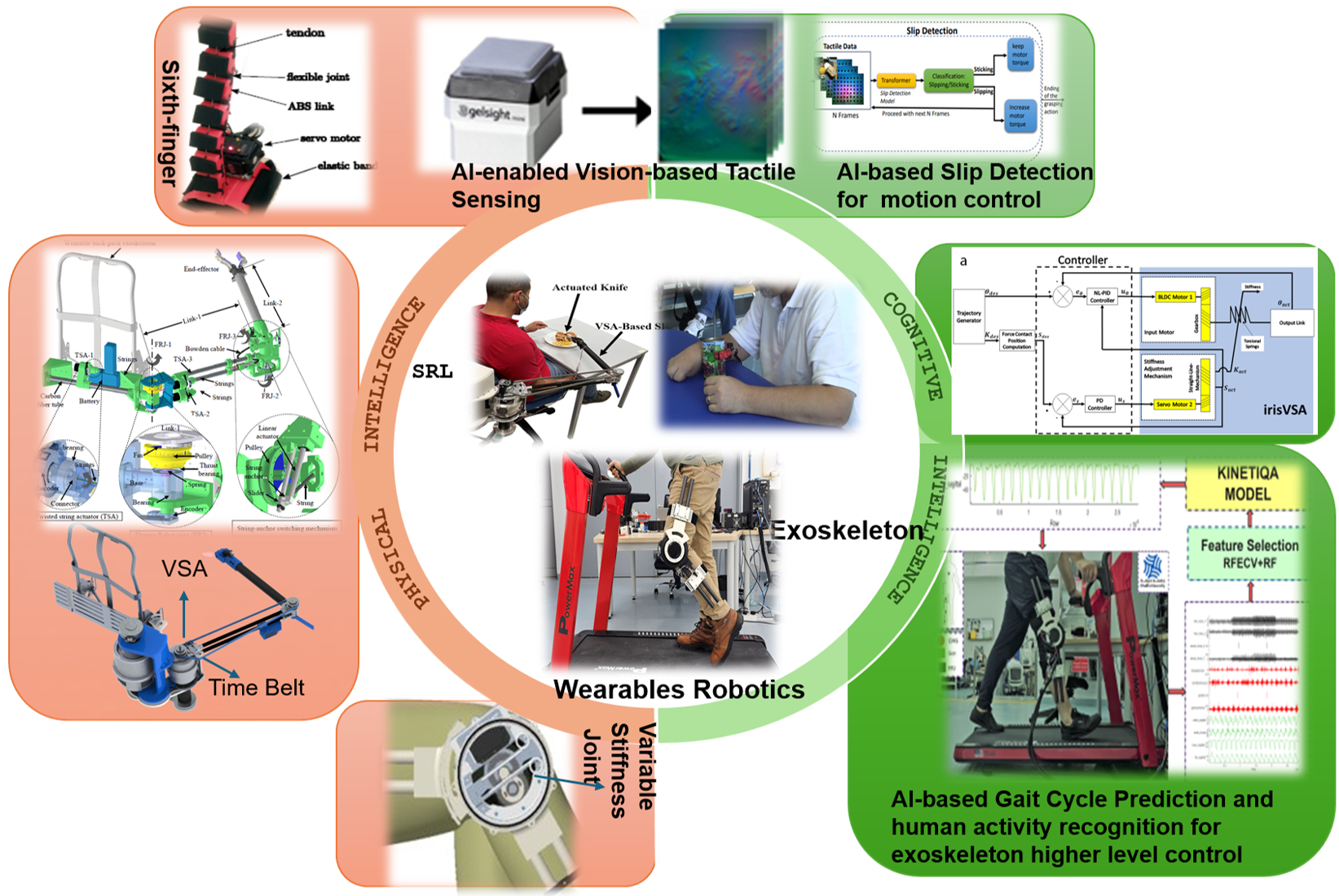
Compliant Knee Exoskeleton for Rehabilitation and Assistance of post-stroke hemiplegic patients - ARIC/Mubadala
Stroke survivors often face significant challenges with mobility, particularly in the knee joint, a critical area that affects approximately 25% of adults, limiting their function and quality of life. Traditional rehabilitation methods rely on repetitive limb movements guided by therapists, which require considerable consistency and labor. While robotic devices such as exoskeletons offer promising solutions for rehabilitation, they are often hindered by issues related to portability and actuation. In response to these challenges, we propose the development of a compliant knee exoskeleton that features stiffness modulation, mimicking the natural movement of the human knee during gait. This innovative design aims to provide more effective assistance to patients, enhancing their rehabilitation process and improving overall mobility.
User-Defined Sixth Finger: Designing A Robotic Assistive Device to Support Stroke Patients - Swedish Government – STINT
After a stroke, many individuals struggle with hand and finger movements, making it difficult to perform basic tasks like holding objects due to conditions such as hemiplegia. To support these individuals, supernumerary robotic limbs have been developed to either enhance the functionality of the unaffected limb or provide additional assistance to the impaired one. This research has two primary objectives: the development of advanced assistive technology and the implementation of user-centric evaluation methods that prioritize the patient's experience. The collaboration between Chalmers University's Interaction Design Unit and Khalifa University's Mechanical Engineering Department brings together the necessary expertise to achieve these goals, aiming to improve the quality of life for stroke survivors.
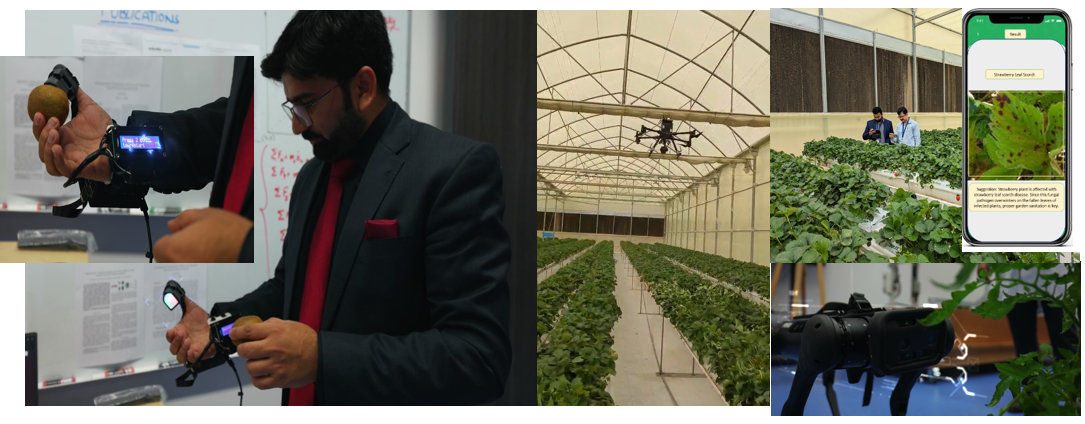
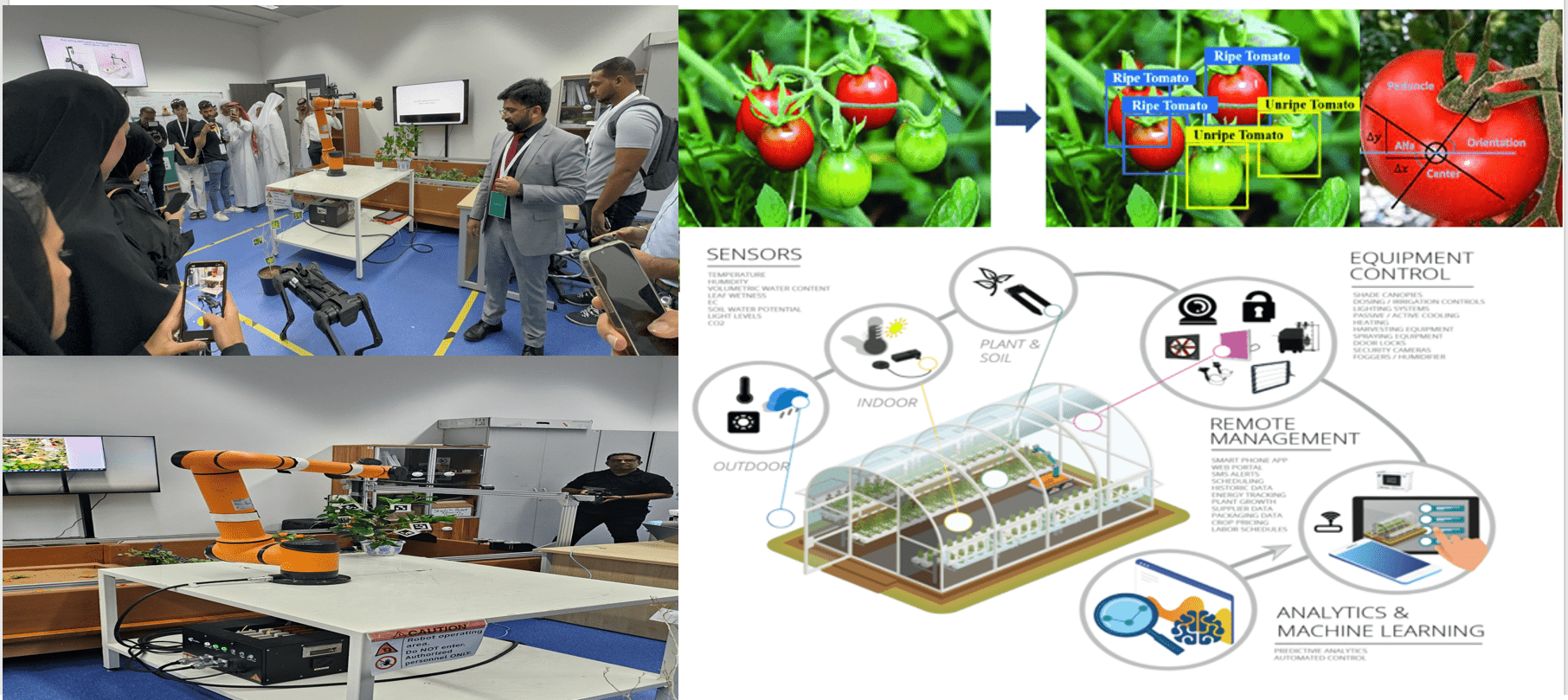
VRI: AI driven Robotics for Greenhouse and indoor farming - ASPIRE
The agriculture sector is facing increasing challenges due to population growth, climate change, and environmental degradation, all of which are further amplified by the overuse of pesticides. Historically, agricultural practices have been transformed by industrial revolutions, and the ongoing Fourth Agricultural Revolution (4AR) is now harnessing Robotics, AI, and IoT to tackle tasks such as indoor farming. This project aims to advance AI-based localization and robot-assisted harvesting technologies, specifically designed to address the complexities of varying crop maturity and environmental factors. A key component of this effort is real-time monitoring, which optimizes crop growth models tailored to local conditions, while also enhancing robotic systems for indoor farming. Our objective is to develop a sustainable, high-quality, and cost-effective agricultural solution that leverages cutting-edge technology to maximize yield and efficiency.
Agri Robotics for greenhouse farming - KUCARS-T4
The agriculture sector faces significant challenges in automating essential tasks such as planting, inspection, harvesting, and weeding, particularly in unstructured environments. Current robotic systems, despite their high precision, speed, and efficiency, struggle with these tasks due to the complexities of varying conditions and the need for autonomous operation.
To address these challenges, this theme will focus on advancing AI-driven mobile grasping and manipulation in industrial robotics. By leveraging cutting-edge AI technologies, our approach aims to enhance the capabilities of robots to operate effectively in dynamic agricultural environments. This involves developing solutions that improve robot manipulation and adaptability, thereby enabling more intelligent and autonomous systems for agriculture. Ultimately, our goal is to revolutionize agricultural practices by creating robots that can seamlessly perform a wide range of tasks, leading to increased efficiency and productivity in the sector.
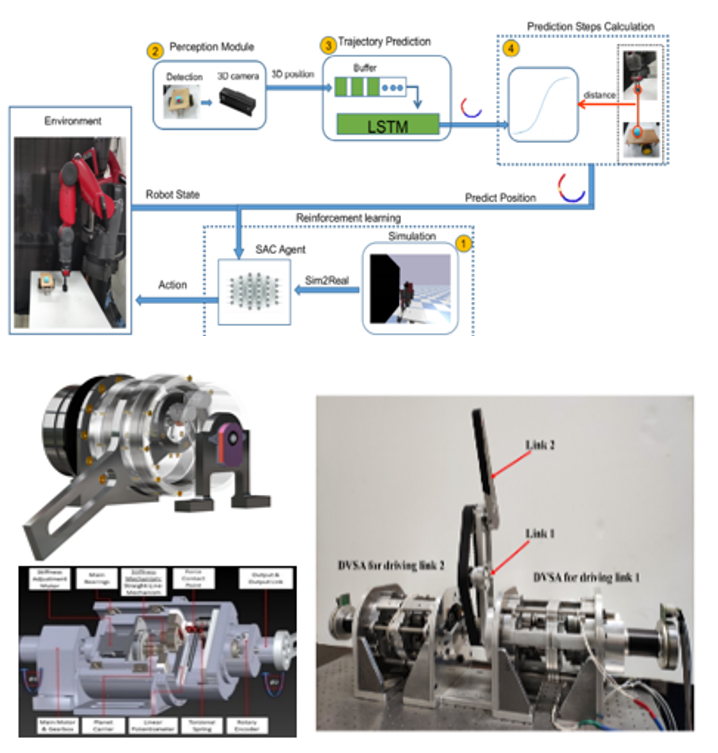
Compliant Manipulation - KUCARS-T3 (2018-2023)
Manufacturing systems face challenges related to cost efficiency and adaptability to real-world variability, with robots offering significant potential to address these issues. As humans remain integral to manufacturing processes, co-working scenarios, where robots and humans share the same workspace, are increasingly common.
This project aims to develop innovative compliant robotic manipulation systems designed for safe human-robot collaboration in complex industrial tasks. The focus will be on enhancing safe interactions through novel mechanical system designs, advanced sensing technologies, intelligent control algorithms, and human intention prediction. We will create a new robotic manipulation system featuring switchable compliant and rigid working modes to facilitate safe and effective human-robot co-working. This system will be benchmarked against leading research and commercial manipulators, such as the Baxter robot and KUKA iiwa, to ensure its performance and reliability in real-world applications.
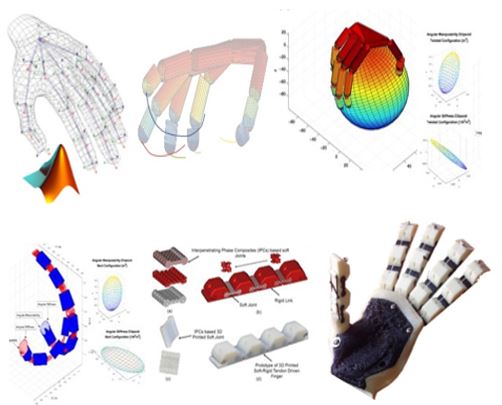
Robotic Hands with Embodied Human like Compliance and Sensing for Soft Manipulation- FSU 2021- KU
The complexity of robotic grasping merges design, actuation, sensing, and control. My innovations have resulted in robust and intuitive robotic hands, drawing inspiration from human hand synergies. Using mathematical models and advanced materials, as shown in Fig, we've achieved significant advancements. I've notably contributed to grasping algorithms and neuromorphic event-based tactile sensing. Our team is also focusing on complex environment grasping algorithms. My goal is to leverage this technology across sectors, especially in handling delicate and irregular items in fields like agriculture and medicine.

Hubot: Houbara robot for behavioural studies in the field and sampling - International Fund for Houbara Conservation (IFHC)
Studying animal behaviour requires appropriate perception systems, but these can disturb natural behaviours, especially in birds. To minimize disturbances, robots mimicking certain bird species have been introduced for behavioural studies in the wild. These robots, equipped with perception systems, closely observe birds without alarming them and record behaviours in real-time. Robots can also interact with birds using movements, postures, and playback recordings, introducing new data collection dimensions like inducing mating behaviour. A unique robot application would be collecting semen from wild males, benefiting conservation programs by capturing genetic diversity without removing individuals. For this project, we aim to develop a Houbara Robot for observation, interaction, and semen collection in their natural habitats.
Saveral PostDoc positions are avaliable under following projects. To apply please send you CV at irfan.hussain@ku.ac.ae