- Admissions
- Academics
- Research Office
- Student Life
- News & Events
- Outreach
- About
Prof. Roberto Sabatini has over three decades of experience in aerospace, defense, and geospatial systems research and education. Throughout his career, he has served in various leadership roles within industry, government, and academic organizations across Europe, North America, Australia, Asia, and the Middle East. He joined Khalifa University in 2021 as Chair of the Aerospace Engineering Department and was appointed Chair of the Aerospace Research Strategy Committee in 2022. In this role, he collaborated with industry, government, and academic stakeholders to develop a robust innovation ecosystem for the rapidly evolving aerospace and aviation sectors in the UAE. In the same period, Prof. Sabatini founded the Aerospace Systems Research Group (ASRG) and the Guidance, Navigation, and Control Laboratory (GNC Lab).
Currently, Prof. Sabatini leads Khalifa University's Future Aviation Leadership Center and Outreach Network (FALCON), a transdisciplinary innovation hub focused on industry-driven research and professional training in sustainable aviation, Advanced Air Mobility (AAM), and trusted autonomous aerospace systems. FALCON partners with prominent national and international organizations to drive advancements in these fields, working closely with industry to co-develop cutting-edge aerospace platforms, as well as next-generation flight and airspace management infrastructure. By transforming aerospace research into deployable solutions, FALCON supports the UAE's vision for net-zero aviation, intelligent mobility, and a knowledge-based economy.
Prof. Sabatini holds various academic qualifications in engineering, science, and management disciplines, including doctoral degrees in Aerospace Engineering (Cranfield) and Geospatial Systems (Nottingham). As a licensed Flight Test Engineer, Private Pilot, and Remote Pilot, he has logged more than two thousand flight hours on various aircraft types, including jets, turboprops, propeller aircraft, helicopters, and both fixed-wing and multi-rotor unmanned aircraft. Prof. Sabatini is a Fellow of the Institute of Electrical and Electronic Engineers (IEEE), the Royal Aeronautical Society (RAeS), the Royal Institute of Navigation (RIN), and the International Engineering and Technology Institute (IETI). Additionally, he is a Chartered Professional Engineer, Fellow, and Engineering Executive with the Institution of Engineers Australia (IEAust).
Before joining Khalifa University, Dr. Sabatini was a Professor of Aerospace Engineering and Aviation at RMIT University (Melbourne, Australia). During his tenure at RMIT (2013-2021), he served in various leadership roles, including Chair of the Cyber-Physical Systems Group, Deputy Director of the Sir Lawrence Wackett Aerospace and Defence Center, and Director of the Intelligent and Autonomous Aerospace Systems Laboratory. Additionally, from 2020 to 2021, he served as Chair of the RMIT Research Committee, the Academic Board's governance body devoted to research and research training at an institutional level. From 2011 to 2013, Professor Sabatini was affiliated with the Department of Aerospace Engineering of Cranfield University, where he led the multinational research team contributing to the European Union Clean Sky Joint Technology Initiative for Aeronautics and Air Transport. Between 1990 and 2011, he held progressively more responsible positions in Research, Development, Test and Evaluation (RDT&E) organizations, playing a significant role in large-scale aerospace and defense programs.
As an academic, Prof. Sabatini has secured research funding in excess of US$30 million from several industry and government partners. He is the author of more than 350 peer-reviewed international publications as well as editor, author, or co-author of multiple books and research monographs. For his research and leadership contributions, he received various national and international recognitions, including: Aviation Business Middle East Technology Innovation Award for Advanced Air Mobility (2024); Aerospace/Aviation Australia Distinguished Leadership Award (2021); Australian Defense Industry Scientist of the Year Award (2019); Northrop Grumman Professorial Scholarship Award (2017); SARES Sustainable Aviation Science Award (2016); SAE Arch T. Colwell Merit Award (2015); and NATO RTO Scientific Achievement Award (2008). The Australian Research Special Report 2021 recognized Prof. Sabatini as the top national scientist in the field of Aerospace Engineering and Aviation and, since 2019, he has been listed by the Stanford ranking among the top 2% most cited researchers globally in the field of Aerospace and Aeronautics.
Prof. Sabatini holds or has held honorary and visiting appointments at a number of institutions, including RMIT University, Polytechnic University of Turin, Durban University of Technology, University of Greenwich, and Chosun University. Since 2018, he has served as a consultant to the UAE Space Agency and, in 2023, he joined the advisory board of the TII Propulsion and Space Research Center. Since 2020, Prof. Sabatini has served as a Distinguished Lecturer of the IEEE Aerospace and Electronic Systems Society (AESS), and was Chair of the AESS Avionics Systems Panel (ASP) from 2021 to 2024. Appointed to the AESS Board of Governors in 2022, he was elected Vice President of Technical Operations in January 2024. Prof. Sabatini is a founding Co-Editor of the IEEE Press Series on Aeronautics and Astronautics Systems, Editor for Progress in Aerospace Sciences, and Associate Editor for the IEEE Transactions on Aerospace and Electronic Systems, Robotica, and the Journal of Navigation.
Hybrid-Electric Power and Flight Management Systems for the eZELOS AAM Aircraft
This Research, Development, Test, and Evaluation (RDT&E) project addresses the challenges associated with designing, testing, and certifying the next-generation of hybrid-electric coaxial rotor aircraft for Advanced Air Mobility (AAM). By combining the well-established UASystems’ rotorcraft expertise with KU’s award-winning hybrid-electric technologies, this project is paving the way for a versatile family of aircraft capable of supporting a range of applications, including cargo transport and passenger mobility, without the need for dedicated ground infrastructure. The ongoing RDT&E activities within the FALCON Program are centered on the development and integration of hybrid-electric power and flight management systems. This work encompasses key areas, such as energy flow optimization in parallel hybrid propulsion systems, cutting-edge thermal regulation technologies, advanced flight dynamics analysis for coaxial rotors, and adaptive human-machine interactions. These systems are being designed to accommodate various levels of automation, from piloted operations to advanced autonomous capabilities.
Hybrid-Electric V/STOL Aircraft for Sustainable Air Mobility
Our research in the field of Advanced Air Mobility (AAM) explores the opportunities offered by highly automated and autonomous flight platforms with Vertical and Short Takeoff and Landing (V/STOL) configurations to enhance the efficiency, safety, and environmental sustainability of Point-to-Point (P2P) transportation, covering both goods and passengers. This focus is particularly relevant in the context of low-altitude Urban and Regional Air Mobility (UAM and RAM) operations. Several medium/large-sized Unmanned Aircraft Systems (UAS) and other candidate AAM vehicles rely on conventional Internal Combustion Engines (ICE) rather than electric motors. This is due to the energy density and specific energy limitations of electric batteries, resulting in insufficient range and flight duration. However, ICE solutions are carbon-intensive, polluting, and inefficient, as well as operating optimally only at specific throttle settings that often exceed the required thrust during flight. The primary objective of our project is to develop a Vertical Take-Off and Landing (VTOL) technology demonstrator incorporating an intelligent Hybrid-Electric Propulsion System (iHEPS). This system aims to maximize operational range and/or flight time while minimizing fuel burn and emissions. In particular, we leverage opportunities from optimized propulsive profiles, energy harvesting/management techniques, and advancements in more electric aircraft technologies to provide a flexible iHEPS solution suitable for various AAM applications. Our approach involves a detailed parametric analysis utilizing data from state-of-the-art and commercially available components associated with selected aerial platforms. To date, we have extensively investigated range and endurance performances, identifying significant interdependencies between design and operational flight parameters. Current research focuses on developing intelligent thrust control and power management strategies tailored to specific aircraft configurations and flight/mission profiles.

Flight Systems Research and Development for the Manta ANN Aircraft
As part of the FALCON Program, Khalifa University is partnering with Manta Aircraft for the development of innovative flight systems for the long-range hybrid-electric aerial eV/STOL (Vertical and Short Take Off and Landing) platform named MANTA-ANN. This is the first step of a multi-year program aiming to co-develop a new family of aircraft for Urban and Regional Air Mobility (UAM/RAM). The focus of this strategic partnership is on advancing a variety of avionics systems for highly automated and autonomous flight operations. Particular emphasis will be placed on Sense-and-Avoid (SAA), Guidance, Navigation, and Control (GNC), and Human-Machine Interface and Interactions (HMI2) for the innovative MANTA-ANN aircraft. This alliance will also spearhead the development of educational programs and strengthen the local UAE UAM/RAM innovation ecosystem. It is expected that the knowledge and expertise gained in this project will have broader applications beyond UAM/RAM, extending to sectors like conventional aviation, automotive, and future green energy storage and management.
Cognitive Human-Machine Systems for Air and Space Transport Operations
This research project addresses the conceptual design, prototyping and verification of a Cognitive Human-Machine Interfaces and Interactions (CHMI2) system to drive adaptive automation based on sensing of the user’s cognitive states. The adaptive automation capability offered by the CHMI2 system provides a pathway towards higher levels of human-machine teaming to support trusted autonomous air and space transport operations. Three potential applications are considered: (1) Remote Pilot Station (RPS) supporting multiple simultaneous operations of Unmanned Aircraft Systems (UAS); (2) Virtual Pilot Assistant (VPA) system for commercial Single-Pilot Operated (SiPO) aircraft; and (3) Avionics and Ground Control Segment (GCS) evolutions for point-to-point suborbital space transport. The CHMI2 architecture comprises three modules, namely: sensing, estimation and adaptation. The sensing module consists of a suite of sensors and algorithms for observing and extracting suitable physiological features of the user. The estimation module contains models that translate the features from the sensing module into measures of the user’s cognitive state. The adaptation module contains the logics that drive adaptation in the Human-Machine Interface (HMI) and system automation modes based on the estimated cognitive states. Development and test activities are currently ongoing, focused on verifying the performance of each individual module in the intended operational environment and will be followed by Human-in-the-Loop (HITL) testing of the prototype systems.
Intelligent Health and Mission Management Systems for Aerospace Applications
Intelligent Health and Mission Management (IHMM) is the next major evolution in the line of system health management concepts in the aerospace and defence industries. IHMM exceeds the maintenance and logistics support benefits of traditional health management systems by introducing predictive integrity and dynamic mission management capabilities. This involves utilizing a combination of real-time measurements from distributed sensor networks as well as high-fidelity models of subsystems and faults to predict the state of health of systems and enable subsequent reconfiguration of systems and replanning of mission activities. Furthermore, dynamic mission management and real-time decision support are novel aspects of health management systems that are enabled by the enhanced health monitoring and health prediction capabilities brought forward by IHMM. These capabilities allow IHMM systems to assume a safety-critical and mission-essential role in the next generation of trusted autonomous aerospace and defence systems. This research project addresses the development of a number of diagnostic and prognostic tools to be utilized in such health management system frameworks for three distinct case studies. The case studies are selected to analyse the different IHMM development requirements across conventional, semi-autonomous and autonomous systems. A variety of Artificial Intelligence (AI) and Machine Learning (ML) tools are utilized in the development of the diagnostic and prognostic algorithms. The limitations of the inference processes developed in each case study is considered. These are mainly associated with the fidelity and assumptions made in the models used to represent the behaviour of systems, as systems operating in the real-world are subject to many external environmental and operational factors with complex interactions that are difficult to account for in physical models. This suggests that the optimal approach is to capitalize on the complementary advantages of both model-based and data-driven approaches to maximise the accuracy, timeliness and reliability of integrity assessments as well as predictions. The integration of IHMM frameworks within selected case-studies are presented, considering the flow of sensor measurements, data and commands. The benefits of the mission reconfiguration capability brought forward by IHMM in response to a detected or predicted fault or performance degradation is demonstrated. This supports future development of more complex forms of IHMM based mission reconfiguration.
GNSS Performance Monitoring and Augmentation for Safety-Critical Applications
In an era of significant air traffic expansion characterized by a rising congestion of the radiofrequency spectrum and a widespread introduction of Unmanned Aircraft Systems (UAS), Global Navigation Satellite Systems (GNSS) are being exposed to a variety of threats including signal interferences, adverse propagation effects and challenging platform-satellite relative dynamics. Thus, there is a need to characterize GNSS signal degradations and assess the effects of interfering sources on the performance of avionics GNSS receivers and augmentation systems used for an increasing number of mission-essential and safety-critical aviation tasks (e.g., experimental flight testing, flight inspection/certification of ground-based radio navigation aids, wide area navigation and precision approach). GNSS signal deteriorations typically occur due to antenna obscuration caused by natural and man-made obstructions present in the environment (e.g., elevated terrain and tall buildings when flying at low altitude) or by the aircraft itself during manoeuvring (e.g., aircraft wings and empennage masking the on-board GNSS antenna), ionospheric scintillation, Doppler shift, multipath, jamming and spurious satellite transmissions. Anyone of these phenomena can result in partial to total loss of tracking and possible tracking errors, depending on the severity of the effect and the receiver characteristics. After identifying GNSS performance threats, the various augmentation strategies adopted in the Communication, Navigation, Surveillance/Air Traffic Management and Avionics (CNS+A) context are addressed in this project. GNSS augmentation can take many forms but all strategies share the same fundamental principle of providing supplementary information whose objective is improving the performance and/or trustworthiness of the system. Hence it is of paramount importance to consider the synergies offered by different augmentation strategies including Space Based Augmentation System (SBAS), Ground Based Augmentation System (GBAS), Aircraft Based Augmentation System (ABAS) and Receiver Autonomous Integrity Monitoring (RAIM). Furthermore, by employing multi-GNSS constellations and multi-sensor data fusion techniques, improvements in availability and continuity can be obtained. SBAS is designed to improve GNSS system integrity and accuracy for aircraft navigation and landing, while an alternative approach to GNSS augmentation is to transmit integrity and differential correction messages from ground-based augmentation systems (GBAS). In addition to existing space and ground based augmentation systems, GNSS augmentation may take the form of additional information being provided by other on-board avionics systems, such as in ABAS. As these on-board systems normally operate via separate principles than GNSS, they are not subject to the same sources of error or interference. Using suitable data link and data processing technologies on the ground, a certified ABAS capability could be a core element of a future GNSS Space-Ground-Aircraft Augmentation Network (SGAAN). Although current augmentation systems can provide significant improvement of GNSS navigation performance, a properly designed and flight-certified SGAAN could play a key role in trusted autonomous systems and other cyber-physical system applications such as UAS Sense-and-Avoid (SAA).
Multiobjective Optimisation of Aircraft Flight Trajectories in the ATM and Avionics Context
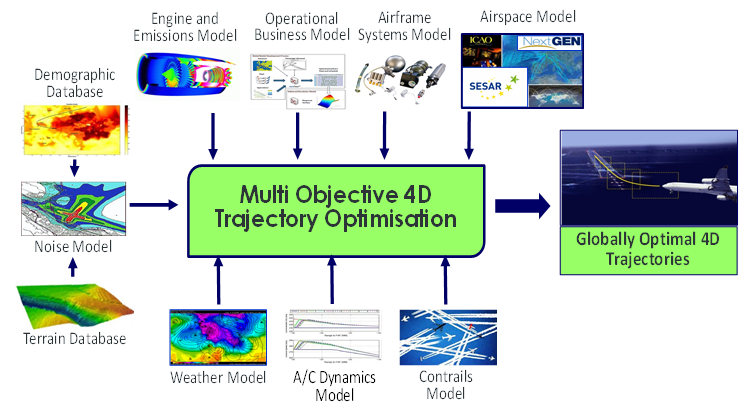
The continuous increase of air transport demand worldwide and the push for a more economically viable and environmentally sustainable aviation are driving significant evolutions of aircraft, airspace and airport systems design and operations. Although extensive research has been performed on the optimisation of aircraft trajectories and very efficient algorithms were widely adopted for the optimisation of vertical flight profiles, it is only in the last few years that higher levels of automation were proposed for integrated flight planning and re-routing functionalities of innovative Communication Navigation and Surveillance/Air Traffic Management (CNS/ATM) and Avionics (CNS+A) systems. In this context, the implementation of additional environmental targets and of multiple operational constraints introduces the need to efficiently deal with multiple objectives as part of the trajectory optimisation algorithm. This project aims to develop innovative Multi-Objective Trajectory Optimisation (MOTO) techniques for transport aircraft flight operations, taking advantage of the most recent advances introduced in the CNS+A research context. The most suitable MOTO mathematical formulation and numerical solution techniques are identified (e.g., discretisation and optimisation methods), together with the strategies to articulate preferences and to select optimal trajectories when multiple conflicting objectives are present. Appropriate models are also developed to define optimality criteria and constraints in specific MOTO studies, including fuel consumption, air pollutant and noise emissions, operational costs, condensation trails, airspace and airport operations. Relevant atmospheric and weather modelling approaches are also covered, with a focus on the latest advancements in the respective application areas. Simulation tools are developed and dedicated cases studies are performed to validate the MOTO algorithms in the both strategic and tactical ATM operational tasks. Considering the significant ongoing evolutions of CNS+A technologies for low-level ATM, UAS Traffic Management (UTM) and Advanced Air Mobility (AAM), useful guidelines for future MOTO research are also formulated.

StopRotor – A New VTOL Aircraft Configuration
The StopRotor Unmanned Aerial Vehicle (UAV) is a new aircraft configuration capable of both rotary and fixed wing flight. The design combines the versatility of the rotary-wing system with fixed wing efficiency by in flight configuration changes. The StopRotor is capable of carrying a 40% payload relative to its empty flying weight. The optimization of the aircraft propulsion and Guidance, Navigation and Control (GNC) systems for an expanded range, endurance and mission capability relies on the ability to accurately model the platform aerodynamics. Wind tunnel and aerodynamic analysis using Vortex Lattice Methods (VLM) were therefore performed in the initial phases of this project to extract and validate the aerodynamic 6DOF model (project funded by the Australian DoD and conducted in collaboration between StopRotor Pty Ltd, GNC Solutions Pty Ltd and RMIT University). A “Proof-of-concept” StopRotor aircraft has also demonstrated the platform basic operational capability. In particular, the following primary flight modes/manoeuvres were accomplished: (1) Vertical Take Off and Landing (VTOL); (2) Hover; (3) Conventional & Short TOL; (4) Fixed wing flight; and (5) Compound/rotary flight. Flight demonstrations have also uncovered how the StopRotor transitions between rotary and fixed wing configurations through specific manoeuvres. These manoeuvres have been progressively refined through flight trials and associated data analysis. Despite this significant progress, the success of the platform relies on the effective automatic control in its 3 primary flight modes: fixed wing, rotary wing and the transition between the two. Research in transitional manoeuvres is novel and only a limited literature is currently available in the engineering body of knowledge. Therefore, further research in this area will be highly instrumental in the StopRotor’s future development.

Flight Guidance and Mission Management Systems for Unmanned Reusable Space Vehicles
Unrestricted access to all classes of airspace, traditionally a prerogative of commercial transport aircraft, is gradually being extended to Unmanned Aircraft Systems (UAS) and space transportation vehicles. The coexistence of various conventional, remotely piloted and autonomous aerospace vehicles in the same airspace dictates higher levels of automation of flight tasks and airspace management functions, towards ensuring mission success while guaranteeing the required levels of safety, efficiency and sustainability. Such higher levels of automation for both manned aircraft and autonomous flying robots, can only be achieved through the development and deployment of on-board Flight Guidance Systems (FGS) and associated ground-based Mission Management Systems (MMS) implementing essential Command, Control and Coordination (C3) functions. In this context, our primary research focus is on the Design, Development, Test and Evaluation (DDT&E) of advanced FGS and MMS architectures supporting Two-Stage to Orbit (TSTO) operations of Unmanned Reusable Space Vehicles (URSV). The primary objective of the FGS is autonomous trajectory planning and execution, while the MMS enables human-autonomy teaming though AI-based decision support algorithms and Cognitive Human-Machine Interfaces and Interactions (CHMI2) in a data-driven Multi-Domain Traffic Management (MDTM) environment. The SL-12 unmanned space vehicle was initially used as the reference URSV platform and a detailed architecture of the FGS was developed. Dedicated algorithms were also implemented for launch and re-entry trajectory planning. Current research is addressing all flight phases of various TSTO platforms (including VTOL, HTOL and hybrid configurations) and the associated development of MMS architectures for trusted autonomous space transport operations.
GNSS Augmentation Strategies for Urban Air Mobility and UAS Traffic Management
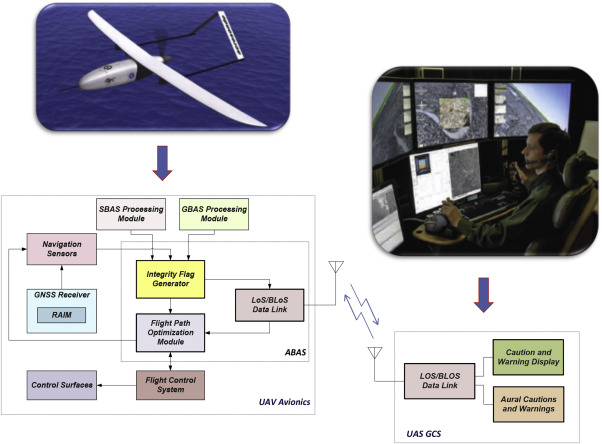
This project investigates the vulnerabilities of Global Navigation Satellite Systems (GNSS) in Urban Air Mobility (UAM) and Unmanned Aircraft System (UAS) applications and focusses on the possible strategies for online and offline navigation performance monitoring and augmentation, which can contribute to trusted autonomy in low-altitude Air Traffic Management (ATM) operations. In previous research, the concept of Vehicle/Avionics Based Integrity Augmentation (ABIA) was introduced and the associated system/software architecture was developed with a focus on predictive Integrity Flag Generation (IFG) and Flight Path Optimization (FPO) functions. Simulation case studies and flight test activities were also performed, addressing the synergies of ABIA with Space/Ground Based Augmentation Systems (SBAS and GBAS) and with Cooperative/Non-Cooperative Sense-and-Avoid (SAA) systems. Based on these case studies, it was concluded that the ABIA system is capable of generating both predictive and reactive integrity flags (i.e., caution and warning signals) when GNSS data are degraded or lost, and it can be successfully integrated with SBAS and GBAS to enhance integrity levels in the relvant UAS/UAM flight tasks. Additionally, in the SAA scenarios investigated and in the dynamic conditions explored, all mid-air collision threats were successfully avoided by implementing real-time software algorithms for navigation/tracking uncertainty analysis and trajectory optimisation. Current research is focusing on the development of a more detailed approach to airspace risk analysis and dynamic geofencing, which also takes into account the effects of weather (wind, clear-air turbulence, precipitation, etc.), wake turbulence, and other natural/human-induced disturbances. Prototype systems are being developed and flight test activities are being conducted on various classes of UAS to assess the potential application of this technology to next generation Mission Management Systems (MMS) and Decision Support Systems (DSS) for UAS Traffic Management (UTM), Urban Air Mobility (UAM), and operations in GNSS-challenged environments.
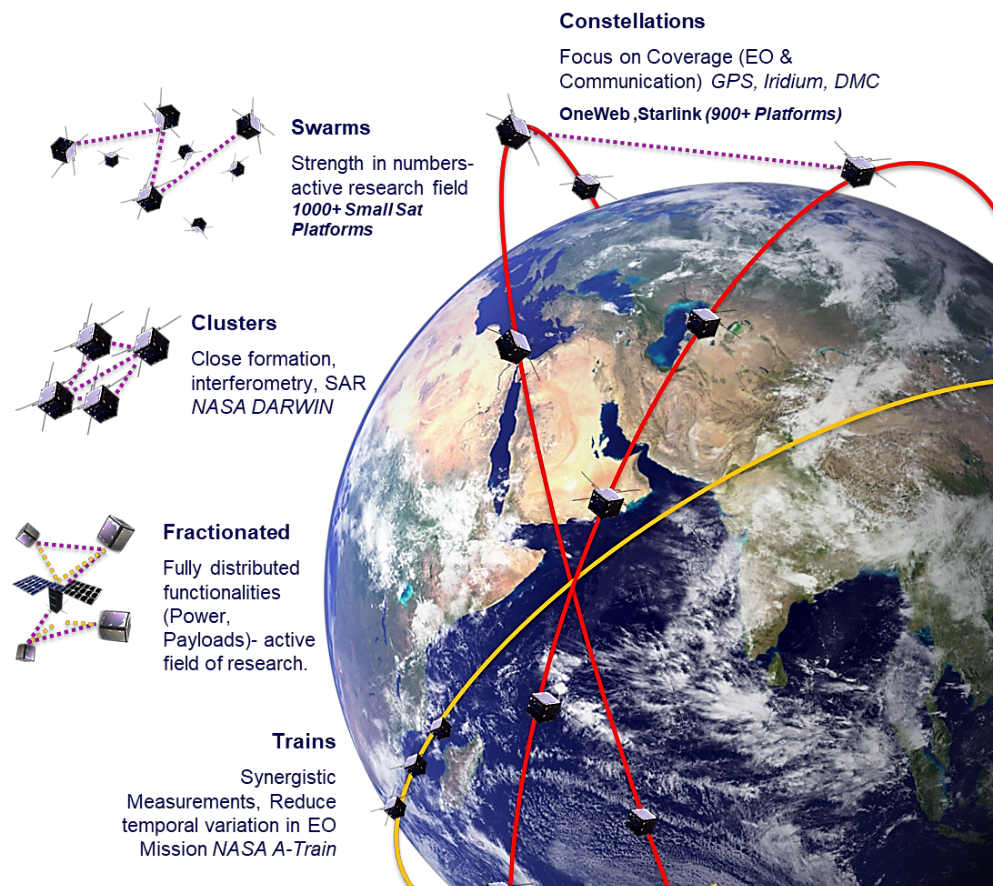
Satellite Resilience and Autonomous Manoeuvring
Both commercial and government entities are increasingly reliant on space-based capabilities including communications; Position, Navigation and Timing (PNT); and Intelligence, Surveillance and Reconnaissance (ISR)/Earth Observation. In this context, resilience is seen as one of the key capabilities. Satellite resilience is affected by a broad range of factors, which collectively contribute to ensuring: a single sensor is working when required; a single satellite can maintain its mission requirements; the constellation as a whole is operationally ready and able; and the operator has the mission specific capabilities available exactly when needed. The focus of this project is on the physical resilience of Low Earth Orbit (LEO) satellites (both individual and within a constellation). For this task, physical resilience is loosely defined as ensuring the satellite/constellation is able to complete its mission in a congested (not contested) and naturally hostile operating environment; this means increasing survivability of the physical asset over the expected lifetime as well as enacting measures to ensure the constellation can maintain operations in the event that a satellite is not functioning properly. The next step is represented by the introduction of Distributed Satellite Systems (DSS) architectures, adopting intersatellite communication links and AI to dynamically reconfigure LEO constellations or alternative satellite formations (swarms, trains, clusters, etc.). In this context, the introduction of AI-based diagnosis and prognosis functionalities is redefining the role of vehicle health monitoring and mission management systems in both civil and military applications.
Artificial Intelligence for Distributed Satellite Systems Autonomous Operations
The goal of this research project is to establish Trusted Autonomous Space Operations (TASO) through dedicated Artificial Intelligence (AI) data processing in Distributed Satellite Systems (DSS) with a focus on the space and control segment co-evolution for Earth Observation (EO) and C4ISR (Communication, Command, Control, Computing, Intelligence, Surveillance and Reconnaissance) missions. Trusted autonomy enhances both DSS design methods and operations, while maximising safety, efficiency and sustainability of space missions. Recent advances in AI techniques for spaceflight systems have proven the ability to perform, adapt and respond to external environmental changes without human intervention. This is critically important for the development of next generation DSS, which require advanced collaboration and coordination approaches to enable new structural functions such as opportunistic coalitions, resource sharing and in-orbit data services. Thus, the system and software design methodologies developed in this project will provide a technical and regulatory pathway for the adoption of trusted autonomous DSS in a variety of civil and military applications. Dedicated EO and C4ISR mission scenarios (developed in collaboration with industry) constitute the basis of detailed simulation case studies to corroborate the validity and effectiveness of the proposed approach. To fully exploit the advantages of DSS architectures, an evolution is also required from the relatively inflexible pre-planned approaches of traditional space operations to systems that are suited for reactive and resilient mission approaches. At its core, this requires the development of novel intelligent Mission Planning Systems (iMPS) that facilitate autonomous Goal-Based Operations (GBO). From a technical standpoint, iMPS must facilitate the autonomous cooperation of DSS to optimally achieve global systems goals within an uncertain, dynamic mission environment. From the human perspective, GBO marks a paradigm shift from a command sequence role to one of a supervisory nature, where system autonomy must be monitored and managed in near-real time. Current research is therefore exploring the concept of supervisory control through the design and development of an human-centric iMPS for autonomous GBO. This system will enable an operator to express their intentions in the form of system goals, predict and visualize the effects of these intentions and provide intelligent mechanisms that support trusted autonomous system behaviour.
Intelligent Decision Support Systems for Multi-Domain Traffic Management
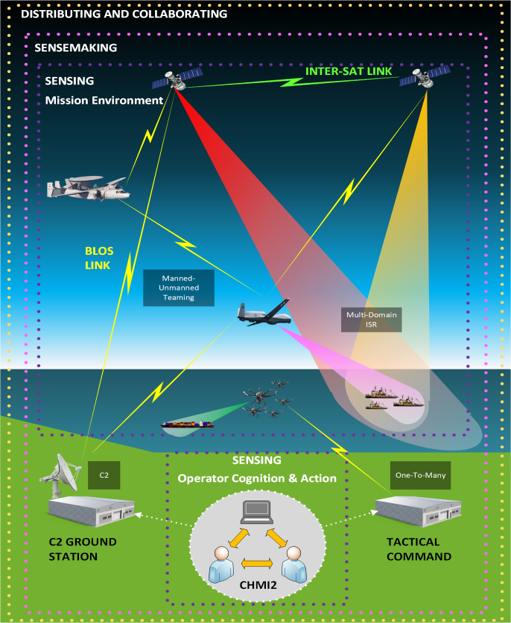
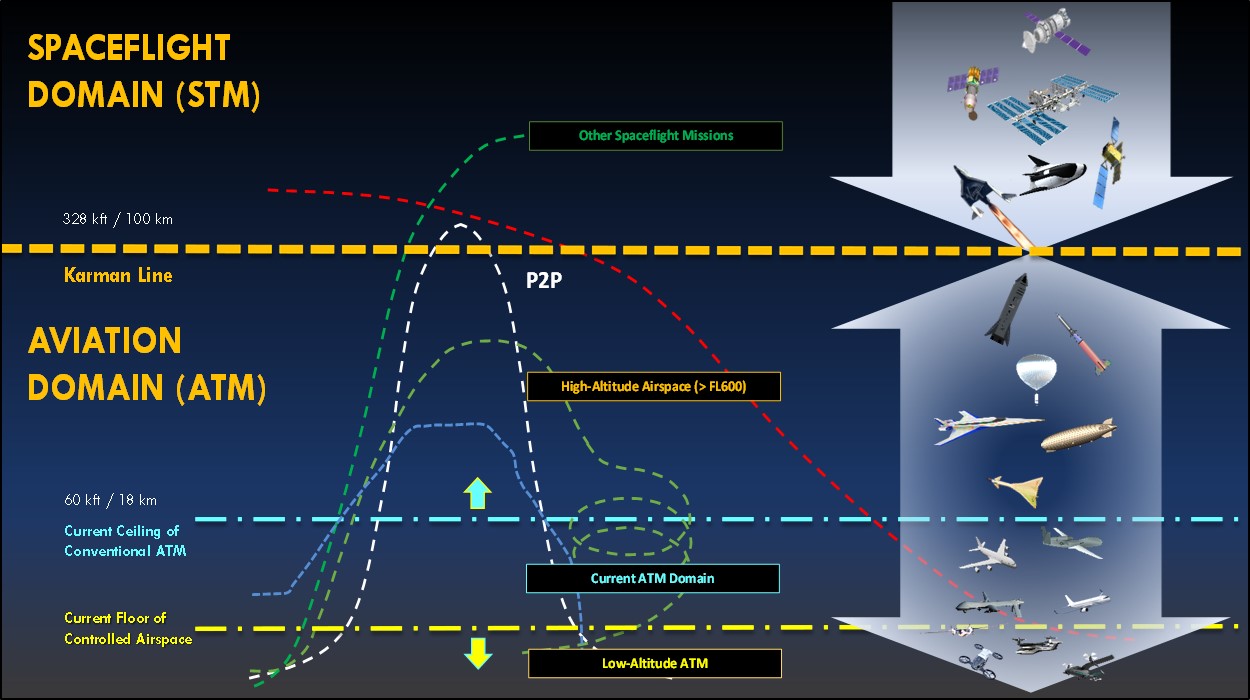
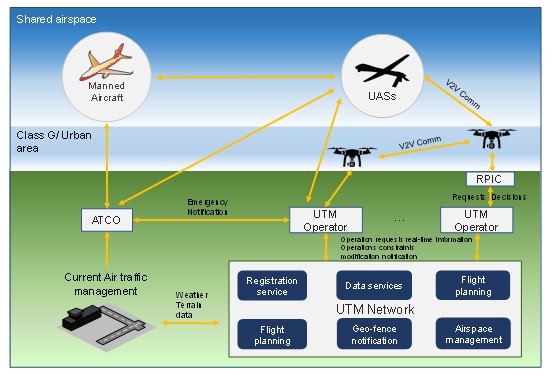
Commercial air and space transport operations are on the rise and the integration of conventional Air Traffic Management (ATM) with emerging Unmanned Aircraft System (UAS) Traffic Management (UTM) and Space Traffic Management (STM) operations is becoming an essential factor to support the anticipated growth of the sector. More specifically, the consolidation of these systems into a Multi-Domain Traffic Management (MDTM) network is required to simultaneously address the array of interrelated requirements (e.g., safety, efficiency and sustainability) underpinning the introduction of new long-range, regional and urban transport services. Recent trends in both atmospheric and sub-orbital point-to-point flight operations have extended the airspace usage beyond conventional ATM boundaries, eliciting the adoption of new legal and technical requirements, which are not properly addressed by the existing International Civil Aviation Organization (ICAO) and Committee on Peaceful Uses of Outer Space (COPUOS) regulations. The coexistence of manned and unmanned (remotely piloted/autonomous) vehicles requires an integrated air-and-space traffic management network with much higher levels of automation than present-day ATM, which can be delivered by evolving Cyber-Physical System (CPS) architectures and Artificial Intelligence (AI) technologies. However, the human understanding of AI based automated decision-making processes is vital in order to build trust, enhance human-autonomy teaming, and support the introduction of mission-essential and safety-critical functions in next-generation ATM and avionics systems. A novel methodology for MDTM and associated intelligent Decision Support Systems (DSS) are therefore needed to support harmonized operations across the air and space domains. Such new approach should incorporate the current ICAO and COPUOS regulatory framework guidelines and addresses the need for unsegregated operations in uncontrolled airspace above 20 km and below the Karman line (100 Km). Despite the challenges existing at a national and global level, an integrated MDTM framework will give administrators the flexibility to manage traffic in a safe, efficient and sustainable manner, and to implement new policies and regulations/standards that accommodate the needs of both aerospace vehicle manufacturers and service providers (i.e., air-and-space transport operators).
Airspace Risk Modelling Research Program: Evolutions for ATM and low-level UAS operations
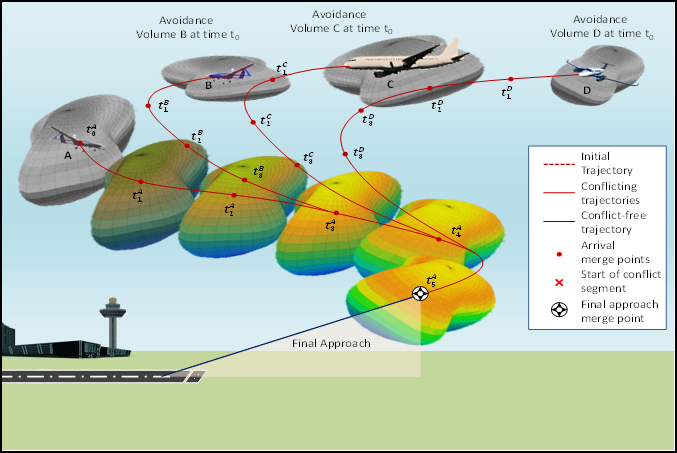
Collision risk modelling has a long history in the aviation industry, with mature models currently utilized in the strategic planning of airspace sectors and air routes. However, the progressive introduction of Unmanned Aircraft Systems (UAS) and other forms of air mobility poses new challenges, compounded by a growing need to address both offline and online operational requirements. To address the existing gaps in the current airspace risk assessment models, this research proposes a comprehensive risk management framework, which relies on a novel methodology to model UAS collision risk in all classes of airspace. This methodology inherently accounts for the performance of Communication, Navigation and Surveillance (CNS) systems and, as such, it can be applied to both strategic and tactical operational timeframes. Additionally, the proposed approach can be applied inversely to determine CNS performance requirements given a target value of collision probability. This new risk assessment methodology is based on a rigorous analysis of the CNS error characteristics and the transformation of the associated models into the spatial domain, in order to generate a protection volume around each predicted collision. Additionally, a novel methodology to rapidly and conservatively evaluate the multi-integral formulation of collision probability is being developed in this project. The validity of the proposed framework will be tested in both simulated scenarios and experimental flight trials.
Design Methods and Digital Control of Advanced Distributed Propulsion Systems
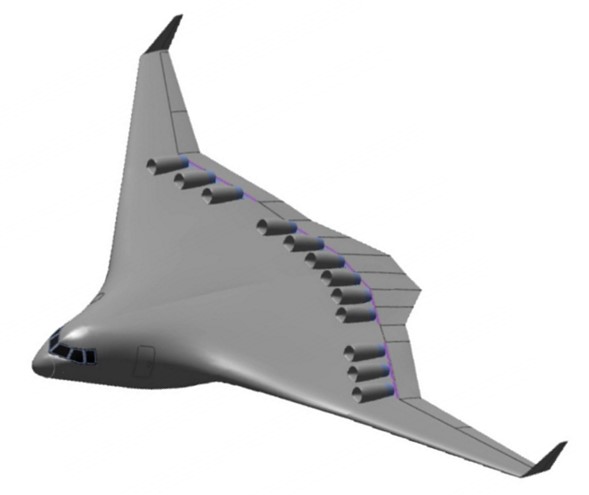
The integration of advanced Distributed Propulsion (DP) systems within various aircraft configurations holds the potential to greatly increase aircraft performance, particularly in terms of fuel efficiency, reduction of harmful emissions and reduction of take-off field length requirements. This has been enabled by modern analysis tools, materials technology and control systems which take advantage of the positive interactions between the propulsion system and the aerodynamics of the aircraft. Synergy between these two systems is maximized when the propulsion system is distributed about the aircraft through the use of distributed nozzles, crossflow fans and multiple distributed fans. Recent advances in electric propulsion have encouraged the hybridization of propulsive systems, with airliners having multiple electric fans powered by one or two gas turbine engines. Furthermore, due to recent advances in airframe integration solutions, the propulsive element can become an integral part of the control and stability augmentation capabilities of the aircraft. Thereby, the digital control of advanced DP systems is crucial for the purpose of thrust modulation and intelligent management of engine resources and health. This not only aids in mission optimization but also supports the case for airworthiness certification of novel aircraft configurations integrating advanced DP systems. This project addresses contemporary advances in hybrid electric technology, aeroelasticity research and the fundamental design steps to integrate advanced DP systems in fixed-wing aircraft. Additionally, an evolutionary approach to the digital control of DP systems is proposed, with a focus on advancing the techniques for mission optimization and engine health management (i.e., diagnosis and prognosis) for enhanced efficiency, safety and sustainability. Based on the proposed design and integration methodologies, conclusions are drawn about the suitability of specific DP technologies for various applications and recommendations are formulated for future research and development.
For recent updates regarding the FALCON Program and the Aerospace Systems Research Group (ASRG), please refer to the following links:
KU Pulse Webcast - Taking Flight with FALCON
KU FALCON Program Launches Innovative VTOL Prototypes at UMEX 2026
KU Explorer Article - Cleared for Takeoff: The Algorithm Behind Safer Air Traffic
FALCON Program's iDSS Project Selected Among World's Top 100 Innovations in 2025
Khalifa University Wins Gold in Al Ain International Radio-Controlled Aerobatic Competition
Aerospace Systems Group and Manta Aircraft Win ‘Technology Innovation of the Year’ Award
Aerospace Systems Group Wins Two Awards at AIAA/IEEE 43rd DASC
Wiley Aerospace Series New Book on Sustainable Aviation
FALCON Projects Showcase at COP28 UAE in Dubai (Dec 2023)
COP28 Project - Drone Hybrid-Electric Propulsion System (HEPS)
COP28 Project - Novel CubeSat for Climate Change Impact Assessment
Prof. Sabatini Named Top Australian Scientist in Aviation and Aerospace Engineering
Khalifa University Joins Forces with International Partners in 2024 NASA RASC-AL Competition
You can find more information about the IEEE Aerospace and Electronic Systems Society (AESS) and some of its recent activities at:
IEEE Aerospace and Electronic Systems Society - Technical Operations
IEEE AESS Technical Operations - Avionics Systems Panel (ASP) Description
IEEE AESS Avionics Systems Panel (ASP) Research and Innovation Perspectives
IEEE Aerospace and Electronic Systems Magazine Special Issue on UAS and AAM
Public Tutorial Presented at the 42nd AIAA/IEEE Digital Avionics Systems Conference
The IEEE AESS Avionics Systems Panel Receives the AESS 2022 Technical Panel of the Year Award
IEEE AESS Distinguished Lecture Hosted by the FAA "New and Emerging Aviation Technologies" Series
Postgraduate Research Projects
Project 1 - AN INTELLIGENT POWER AND PROPULSION MANAGEMENT SYSTEM FOR HYBRID-ELECTRIC AIR MOBILITY
This project is part of a university-industry collaboration initiative aiming to develop an Intelligent Flight Management System (IFMS) for Hybrid-Electric Vertical Take-Off and Landing (HE-VTOL) aircraft, integrating advanced power/propulsion and health/mission management functions. More specifically, this project focuses on developing an Intelligent Power and Propulsion Management (IPPM) subsystem, which utilizes a range of power resources, including renewable and clean energy sources like solar cells and hydrogen fuel cells, to establish a smart microgrid that supplies the necessary electrical power for VTOL operations in UAM/RAM missions. This improves resource efficiency and extends flight endurance beyond current system capabilities. The developed IPPM system prototype will be verified through simulation-based and laboratory/test activities, utilizing the facilities and equipment available at KU and provided as part of this project.
Project 2 - AN INTELLIGENT HEALTH MANAGEMENT SYSTEM FOR DRONE HYBRID-ELECTRIC PROPULSION SYSTEMS
This project is part of a larger-scale Research, Development, Test, and Evaluation (RDT&E) program, conducted in collabopration with industry partners, aiming to develop Intelligent Health and Mission Management (IHMM) systems, which exploit Artificial Intelligence (AI) and suitable sensors to estimate the current and predicted state of safety-critical components on board electric and hybrid-electric aircraft, thereby ensuring operational safety in increasingly automated and trusted autonomous aerospace vehicles. The developed IHMM system shall detect the onset of anomalies and support the planning and execution of reversionary actions. The project will primarily focus on the integrity of electric motors and Internal Combustion Engine (ICE) components, as well as solar cells, fuel cells, and batteries, which are known to suffer a variety of degradation effects due to both operational conditions (e.g., high-temperature environments) and usage (i.e., rate and frequency of charge and discharge). The developed IHMM system prototype will be verified in simulation-based, laboratory, and flight test activities, exploiting the facilities and equipment made available as part of this project.
Project 3 - DIGITAL TWIN AND DIGITAL THREAD IN AEROSPACE SYSTEM DESIGN, TESTING, AND OPERATIONS
Digital twin and digital thread (DT2) technologies are enabling both evolutionary and disruptive innovations in several engineering domains. For instance, nowadays a considerable portion of product design and development activities heavily relies on virtual prototyping, while Artificial Intelligence (AI)-based diagnostics and prognostics are increasingly used as part of the maintenance, repair, and overhaul of aerospace systems. However, the full potential of DT2 paradigms and associated tools is yet to be harnessed. In particular, the far-fetched implications and deep intricacies of embedding DT2 in the product engineering lifecycle and particularly throughout the Design, Development, Test, and Evaluation (DDT&E) of aerospace systems and vehicles have not been explored, with the consequence that these models and methodologies are still mostly reflecting the classical ones which were developed in a different scientific era. This research project aims to address this important gap by redefining the aerospace systems engineering models and methodologies and particularly capture the impacts caused by DT2 technologies. The new lifecycle model shall be directly reflected into practical product DDT&E methodologies to support emerging operational concepts such as suborbital transport and Urban Air Mobility (UAM), which are expected to reshape civil air traffic in the dense UAE airspace.
Project 4 - GNSS VEHICLE-BASED AUGMENTATION SYSTEM FOR URBAN AIR MOBILITY
This research project aims to develop a novel Aircraft-Based Augmentation System (ABAS) for the optimal Integration of multi-constellation Global Navigation Satellite Systems (GNSS) with other low-cost and high-accuracy navigation and tracking systems in urban environments. Currently, GNSS is the primary source of navigation data both for manned and unmanned flight vehicles. In Urban Air Mobility (UAM) operations, GNSS is exposed to a variety of threats, including signal interferences, adverse propagation effects and challenging platform-satellite relative dynamics. Thus, there is a need to characterize GNSS signal degradations and assess the effects of interfering sources on the performance of GNSS receivers and augmentation systems used for an increasing number of UAM applications (both mission-essential and safety-critical tasks). GNSS augmentation can take many forms, but all strategies share the same fundamental principle of providing supplementary information whose objective is improving the performance and/or trustworthiness of the system. While Space-Based Augmentation Systems (SBAS) and Ground-Based Augmentation Systems (GBAS) have been developed and delivered in conventional aviation and other safety-of-life contexts, these systems have limited applicability in urban environments. So, in such environments, GNSS performance augmentation must rely on additional information being provided by other navigation systems/sensors. As these on-board navigation systems normally operate via separate principles than GNSS, they are not subject to the same sources of error or interference. Using suitable data link and data processing technologies on the ground, a certified ABAS capability could be a core element of future UAM navigation and Sense-and-Avoid systems.
Project 5 - SEPARATION ASSURANCE AND COLLISION AVOIDANCE FOR VTOL AIRCRAFT IN URBAN ENVIRONMENTS
This research project aims to develop a novel safety analysis methodology and Decision Support Systems (DSS) that address contemporary mission concepts and operational requirements related to commercial space transport activities and their integration in the United Arab Emirates (UAE) Air Traffic Management (ATM) system. The recent advances in Communication, Navigation, Surveillance (CNS) systems for ATM (CNS/ATM) and Avionics (CNS+A) are a critical ingredient of this novel methodology and are expected to support the definition of new 4-Dimensional (4D) compact envelopes of protection around the launch and re-entry paths. The methodology shall be applicable to study the impacts that a particular space launch/re-entry location will have on civil air traffic in the dense UAE airspace. The developed safety analysis methodology shall be applied to a series of candidate spaceport locations around the country to evaluate the suitability and overall safety associated with various locations and various vehicle concepts. In addition to spaceport requirements, this project will address the air-and-space traffic management integration and develop DSS functional architectures (with associated hardware and software components) suitable for UAE and global operations.
Project 6 - SUSTAINABLE AVIATION FUELS FOR FUTURE AIR TRANSPORT AND ADVANCED AIR MOBILITY
The global aviation industry is under increasing pressure to align with stringent environmental sustainability goals, addressing the critical challenges of reducing carbon emissions and mitigating climate change. This research project investigates Sustainable Aviation Fuels (SAF) and next-generation propulsion technologies, forming a foundational framework for decarbonizing air transport and enabling advanced air mobility. Anchored by the Falcon Program, this initiative explores sustainable biofuels, hydrogen-powered systems, and hybrid-electric propulsion to achieve significant reductions in greenhouse gas emissions while enhancing operational efficiencies. The research priorities include fuel performance optimization, streamlined certification processes compliant with international standards, and comprehensive life cycle assessments emphasizing environmental and economic sustainability. By integrating biofuels and hydrogen into propulsion systems, assessing the viability of hybrid-electric configurations, and fostering advancements in vertical take-off and landing (VTOL) technologies, the project aims to establish a sustainable aviation ecosystem. The outcomes will contribute valuable insights into carbon-neutral aviation, drive future-ready aerospace infrastructure, and align with global policy directives, such as ACARE and ICAO targets. This interdisciplinary effort, conducted at Khalifa University, leverages advanced aerospace engineering, infrastructure integration, and life cycle impact analysis to redefine aviation's role in a sustainable future.
Project 7 - DEVELOPMENT OF HUMAN–MACHINE INTERFACES AND INTERACTIONS FOR ADVANCED AIR MOBILITY AIRCRAFT
The effective integration of human–machine interfaces (HMI2) and autonomy systems presents critical challenges for hybrid-electric aircraft. These include ensuring a seamless flow of information and control across varying levels of automation, integrating usability into autonomous decision-making processes, and maintaining compliance with both regulatory and operational safety standards. Coupling human inputs with automated control systems raises additional complexities requiring innovative solutions to enable scalable and adaptable designs. Addressing these challenges would significantly enhance pilot situational awareness, operational safety, and mission flexibility while paving the way for autonomous air mobility systems to enter commercial service. Expected outcomes of this research are the development of an adaptive HMI2 and autonomy system capable of supporting multi-tiered operational modes. Prototype systems will demonstrate compatibility with both mechanically crewed and autonomous-capable configurations, focusing on user-centered design for seamless human interaction. Deliverables will include a modular HMI2 framework, validation of the system’s adaptability, and enabling operational scalability through experimental testing. Published research will provide significant contributions to academic and practical understanding of HMI2 and autonomous systems for next-generation aircraft.
Project 8 - DEVELOPMENT OF THERMAL MANAGEMENT SYSTEMS FOR HYBRID-ELECTRIC ADVANCED AIR MOBILITY AIRCRAFT
Hybrid-electric systems are prone to thermal risks due to the extended operation of high-power elements during various mission phases, including hover and sustained forward flight. Heat accumulation within electric motors and batteries reduces efficiency and poses significant risks to component reliability. Current technologies for thermal management struggle to balance dynamic thermal loads under varied conditions, restricting the operational scalability of these systems. The challenges include designing cooling systems that are both effective and adaptable, while maintaining compliance with aerospace safety standards and constraints on airframe structure. Addressing these gaps would yield considerable benefits, including extended battery life, reduced thermal degradation, and enhanced reliability of high-power subsystems. Successful solutions could not only advance air mobility but also contribute to broader energy and transportation systems. Key outcomes include computational thermodynamic models for predicting the behavior of primary and secondary high-power systems under various mission demands. These models will form the basis for designing both active and passive cooling prototypes compatible with airframe constraints. Additionally, validated documentation of the integration process and performance metrics will ensure compliance with relevant aerospace safety regulations. The ultimate goal is to develop scalable cooling systems tailored for hybrid-electric air mobility platforms, supported by experimental testing, research publications, and cross-disciplinary innovation.
Project 9 - DEVELOPMENT OF COAXIAL ROTOR SYSTEMS FOR ADVANCED AIR MOBILITY AIRCRAFT
Coaxial rotor configurations offer unique advantages in vertical lift systems, including increased thrust efficiency and compact designs. However, they pose distinct aerodynamic challenges arising from rotor–rotor wake interactions, torque asymmetry, and aerodynamic instability during flight transitions. Additionally, retractable lifting surfaces—essential for improved efficiency in forward flight—complicate stability and control strategies. Current models inadequately address these dynamics, leading to inefficiencies and limited scalability. Resolving these challenges will unlock significant benefits, such as improved vehicle control, optimized efficiency across multiple flight regimes, and safer operations. Enhanced designs resulting from this research would play a central role in advancing the commercialization of hybrid VTOL aircraft for AAM applications. Desired outcomes include detailed aerodynamic models capturing rotor-to-rotor interference, wake interactions, and torque asymmetry under different flight conditions. Prototype designs will include optimized configurations for retractable lifting surfaces, supported by validated simulation results and wind tunnel experiments. Deliverables encompass performance evaluation frameworks for safe and efficient flight dynamics, compliance documentation for certification processes, and recommendations for aerodynamic optimizations tailored to hybrid aircraft configurations. Findings from the project will contribute to both industry advancements and academic knowledge in modern vertical flight systems.
Project 10 - HYBRID-ELECTRIC POWER AND PROPULSION MANAGEMENT SYSTEMS FOR ADVANCED AIR MOBILITY AIRCRAFT
This project is part of a collaboration between UASystems SA and Khalifa University’s FALCON Program to develop the eZELOS family of aircraft, which incorporates a next-generation coaxial hybrid-electric helicopter design. The research focuses on creating innovative strategies for real-time, adaptive energy management within hybrid-electric propulsion systems to improve their efficiency, reliability, and environmental sustainability. Central to this effort is the development of advanced algorithms that enable dynamic optimization of power flow between electric motors and internal combustion engines across extended flight conditions, an essential step towards unlocking the potential of advanced air mobility platforms for both cargo and passenger applications. Tools such as simulations, performance models, and cross-disciplinary methods are being employed to tackle critical challenges in hybrid-electric propulsion technology, which holds the promise of reduced emissions, greater operational ranges, and enhanced energy efficiency. However, the adoption of hybrid-electric systems faces significant hurdles, including optimizing power distribution across varying mission profiles, ensuring reliability under dynamic load changes, meeting stringent aerospace certification requirements, and managing the complexity of adaptable propulsion systems. By overcoming these challenges, this project will contribute to creating safer, more efficient, and environmentally sustainable aircraft systems while introducing scalable hybrid-electric solutions for the advanced air mobility sector, advancing the practical viability of these systems for real-world applications.
Project 11 - EMIRATES MARS MISSION DATA ANALYSIS AND DIGITAL TWIN FOR FUTURE EXPLORATION AND INHABITATION
The success of future Mars missions hinges on the development of robust communication, navigation, and surveillance (CNS) systems capable of operating in the planet's unique atmospheric and ionospheric conditions. These systems must ensure reliable data transmission, accurate positioning, and effective situational awareness for both robotic and human exploration. Mars' environment, however, poses obstacles for electromagnetic signal propagation: radiofrequency (RF) signals are disrupted by ionospheric charged particle effects (refraction, reflection, or absorption), while electro-optical/infrared (EO/IR) signals are affected by atmospheric phenomena such as dust storms, aerosols, and thermal gradients. This research utilizes data from the Emirates Mars Mission (EMM) instruments—EXI (Emirates eXploration Imager), EMIRS (Emirates Mars InfraRed Spectrometer), and EMUS (Emirates Mars Ultraviolet Spectrometer)—through a digital thread and digital twin framework. It aims to analyze Mars' atmospheric and ionospheric dynamics, addressing the impact of ionospheric variability on RF signals and atmospheric phenomena on EO/IR signals. The insights will guide the development of enhanced models, tools, and design guidelines for CNS systems to be deployed in planetary/interplanetary communication networks, navigation systems for vehicles, and aerial/orbital surveillance platforms. This work supports both current and future Mars missions, enabling resilient CNS systems for human-rated and robotic exploration. By collaborating with the Emirates Capability Development Program (ECDP), it fosters workforce development and upskilling in Mars exploration technologies. The project also promises significant industrial spinoffs, including CNS solutions for extreme environments applicable to other space missions, autonomous navigation, and disaster response. Ultimately, this research will support Mars exploration, long-term human settlement, and innovation in the UAE's growing space sector.
Project 12 - ARTIFICIAL INTELLIGENCE FOR THE DESIGN AND OPERATION OF DISTRIBUTED SPACE SYSTEMS
This project focuses on developing advanced tools for the design and operation of Distributed Space Systems (DSS) using Artificial Intelligence (AI) and emerging cyber-physical system (CPS) technologies, such as digital twins and cognitive human-machine interactions. These tools aim to overcome limitations of traditional planning methods by leveraging AI to analyze large volumes of historical data, improving the prediction of system behavior in critical scenarios like orbital collisions, anomalies, and interference. By integrating AI with conventional physics-based models, the project seeks to optimize decision-making for maneuver planning and system reconfiguration, maximizing the resilience, survivability, and performance of space assets. DSS, which involve multiple interconnected space entities working collaboratively, present unique challenges due to their complexity and non-linear dynamics. The adoption of modular, distributed, and fractioned architectures in modern DSS further emphasizes the need for intelligent, autonomous systems capable of navigating an increasingly crowded near-Earth space environment. The project addresses the limitations of current satellite autonomy, which relies on rule-based systems, by fostering Trusted Autonomous Satellite Operations (TASO). AI will play a pivotal role in enabling TASO by enhancing adaptability, predictive capabilities, and system health monitoring. Emerging CPS/AI paradigms, such as digital twins and virtual prototyping, will allow for more accurate modeling of system behavior under off-nominal conditions, enabling more robust and effective design and operational decisions. This research aims to accelerate the transition to a smarter, more autonomous era of satellite and space system operation.
Project 13 - SAFETY-CRITICAL AVIONICS SYSTEMS FOR UNSEGREGATED AIR AND SPACE TRANSPORT VEHICLE OPERATIONS
While investments in commercial space transport technologies are on the rise (both in UAE and globally), the integration of conventional Air Traffic Management (ATM) and Space Traffic Management (STM) operations is becoming an essential factor to support the anticipated growth of the sector. This research project aims to develop a novel safety analysis methodology and Decision Support Systems (DSS) that address contemporary mission concepts and operational requirements related to commercial space transport activities and their integration in the current UAE ATM system. The recent advances in Communication, Navigation, Surveillance (CNS) systems for ATM (CNS/ATM) and Avionics (CNS+A) are a critical ingredient of the novel methodology and are expected to support the definition of new 4-Dimensional (4D) compact envelopes of protection around the launch and re-entry paths. The methodology shall be applicable to study the impacts that a particular space launch/re-entry location will have on civil air traffic in the dense UAE airspace. The developed safety analysis methodology shall be applied to a series of candidate spaceport locations around the country to evaluate the suitability and overall safety associated to various locations and various vehicle concepts. In addition to spaceport requirements, this project will address the air-and-space traffic management integration and develop DSS functional architectures (with associated hardware and software components) suitable for UAE and global operations.
Project 14 - TECHNOLOGY READINESS AND SUSTAINABILITY ANALYSIS OF HIGH-SPEED COMMERCIAL TRANSPORTATION
This project focuses on assessing the technical feasibility, performance, environmental sustainability, and economic viability of High-Speed Flight (HSF), including reusable Two-Stage-to-Orbit (TSTO) commercial space transportation systems, for both civil and commercial applications. This comprehensive study encompasses critical areas such as performance evaluation, where the technical and operational capabilities of HSF vehicles—spanning supersonic, hypersonic, suborbital, and orbital flight modes—are analyzed in conjunction with the environmental and lifecycle impacts of these systems, covering vehicles, airports, spaceports, and their supporting infrastructure. A meticulous sustainability analysis is conducted to evaluate the environmental effects of HSF and TSTO systems, focusing on emissions of pollutants such as CO2, H2O, and NOx at varying altitudes, as well as noise levels, fuel efficiency, and potential strategies for mitigating environmental impact, including the use of alternative fuels, advanced noise reduction technologies, and optimized flight trajectories. The project also investigates the economic viability of implementing HSF as a sustainable transportation solution, exploring its market potential, socio-economic advantages, and the primary challenges involved in introducing such cutting-edge technologies into real-world applications. Utilizing mission-based modeling and case studies on existing and near-term HSF systems, the research evaluates fuel and propellant consumption, alongside the resulting ecological impacts, across both endoatmospheric and exoatmospheric operational profiles. Additionally, the project examines the current regulatory landscape, identifying critical policy gaps and proposing recommendations for harmonized international standards to enable sustainable development, ensure environmental compliance, and support the seamless integration of HSF and reusable space transportation systems into the global transportation infrastructure. This analytical approach aims to provide a robust framework for advancing the development of sustainable, high-speed air and space commercial transportation systems while addressing environmental and economic concerns.
Research Staff Vacancies
Post-Doctoral Fellows and Research Assistants in Intelligent and Autonomous Aerospace Systems - This is an exciting opportunity to join the FALCON Program to work on key contemporary challenges related to intelligent and autonomous aerospace systems, focusing on fault-tolerant avionics, sustainability, and trusted autonomy.
Post-Doctoral Fellow Responsibilities (various positions)
Conduct high-impact research on the design and development of safety-critical avionics, astrionics, and CNS/ATM systems (Communications, Navigation, and Surveillance for Air Traffic Management). Participate in the various activities of the research group under the guidance of the advisor and conduct a program of personal research in the field of avionics and space systems, yielding measurable outcomes including journal and conference publications and attracting industry/government funding. Contribute to the planning and implementation of research facilities and capabilities in the designated area. Support the research performance and reputation of the group/center through appropriate interaction with industry and other research organizations. Successfully undertake and complete research tasks to the required qualitative standards within the agreed timeframes and resources as specified by the project plan. Publish research outcomes and communicate with other team members, clients and the broader research community. Undertake a range of administrative functions associated with the research project s/he is undertaking. Undertake teaching and supervisory duties in line with the expectations of the position. Provide mentorship and guidance to undergraduate and postgraduate students and other researchers within the field of expertise.
Research Engineer / Research Assistant Responsibilities (various positions)
Conduct research, modelling, and test activities in the field of flight dynamics and GNC for UAS and Advanced Air Mobility (AAM) applications, consistently with the expectations of the project. Integrate effectively and participate in the activities of the research group under the guidance of the advisor, ethically and responsibly, fostering a culture of robust team-working, respect, collegiality, and inclusion. Successfully undertake and complete research tasks to the required qualitative standards within the agreed timeframes and resources as specified by the project plan. Take responsibility for reporting the technical progress to the project leader and research group/center, periodically and in a timely manner. Publish research outcomes in high-quality journals and indexed conference proceedings, and communicate with other team members, partners, and the broader research community. Adhere to the University's information security and confidentiality policies and procedures, and report breaches or other security risks accordingly. Perform any other tasks assigned by the Line Manager.
Required Qualifications and Experience
Relevant degree in Aerospace Engineering, Avionics and CNS/ATM Systems, Robotics and Autonomous Systems, or in a closely related subject. High level of proficiency in MATLAB and, possibly, STK. Competence with Python, C++, and/or other object-oriented programming languages is desirable.
.jpg)