- Admissions
- Academics
- Research Office
- Student Life
- News & Events
- Outreach
- About
Dr. Bashar El-Khasawneh is an ASME Elected Fellow, the Founder and Chair of the American Society of Mechanical Engineers (ASME) Professional UAE Section. A founder of the Dexter Robotics startup company. He is currently a professor of Mechanical and Nuclear Engineering at Khalifa University. He served as the chair of the graduate program at the Mechanical Engineering Department from 2016-2019. He served as the Associate Chair for the department from 2013-2016. Before that he acted as an academic advisor for the British University in Dubai to develop an accredited industrial engineering program. Between 2008 and 2010 he was the Manager of the Applied Research Programs at King Abdullah II Design and Development Bureau (KADDB), Jordan. Between 2002 to 2008 he held an assistant professor position in the Industrial Engineering Department, at Jordan University of Science and Technology (JUST), within that time he served as a chairman for the department for two years. Between 1998-2002 he worked for Caterpillar Incorporated in the technical center and for KLA-Tencor with the technology group both in USA. He worked extensively on technical and managerial assistance for many industries. He founded a design and development pre-incubator at the JUST University to train and qualify students to become entrepreneurs. He obtained his PhD in Mechanical Engineering from University of Illinois at Urbana-Champaign, USA (1997). He is a member of the Advisory Board of the Innovation Lab at the Dubai Health Authority (DHA) and a member of the editorial board of IJAER. His current research is focused on developing new concepts of advanced machining centers based on parallel kinematics mechanism and machining in harsh environments by adapting to the environment/geometry and be able to perform machining/welding tasks and developing robotic platforms for 3D printing of structures.
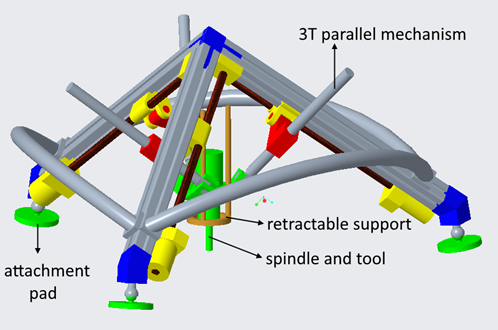
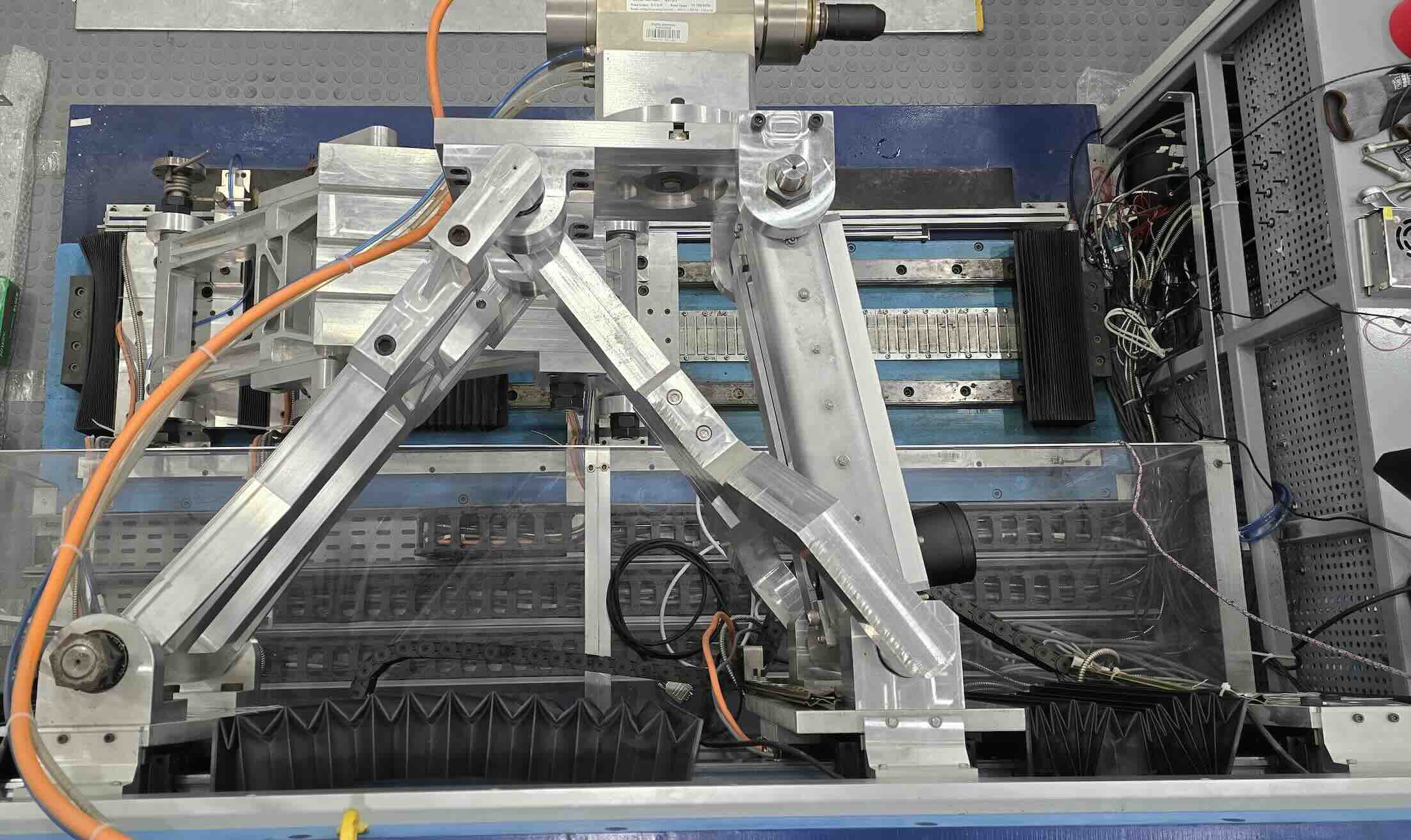
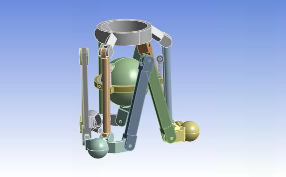
Title: Walking Robot for service and manufacaturing applications.
This system presents a novel walking hybrid-kinematics robot having three degrees of freedom for on-structure machining of large structures. A symmetric 3PRRR parallel mechanism having maximally regular property is used to provide 3D translational manipulation. Three attachment pads are connected to the base of the parallel mechanism through passive spherical joints, whereas multiple attachment pads are connected to the moving platform of the parallel mechanism. Performing a machining task is done by using a retractable tool holder attached to the parallel mechanism's moving platform. Two walking patterns, namely rotational and translational walking patterns, are defined for the robot. The kinematics of the manipulation and walking motions was derived and simulated. Several schemes to perform multi-step walking motions were also discussed. Subsequently, using an energy-based approach with the Stribeck friction model, the robot's dynamics was modeled and experimentally verified. Finally, an implementation of the robot to perform an on-structure machining task is discussed.

Title: Robotics for manufacturing of field large-size structures
The goal of the project is to develop robotic platforms to automate tasks in a number of industrial applications where large-size structures are involved. Application fields include aircraft manufacturing, ship building, and prefabricated construction. In the chosen scenario light and reconfigurable, mobile robots will navigate and perform drilling tasks onto an elongated, non-horizontal structure with a curved surface. We have a patent pending application.
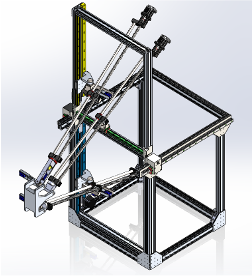
Title: Advanced Control Implementations and Machining on Five-Axes Hybrid Serial-Parallel Kinematics Machine Tool
The project aims to implement different control algorithms using an open architecture controller to control an already designed, fabricated, and tested five-axis hybrid serial-parallel kinematics machine tool. This is a fully functional five-axe machine tool. The different control schemes will be compared in terms of performance and impact on the accuracy and vibration of the machine. Additionally, there will be some machining tests, and the impact of the chosen control scheme will be assessed in terms of machining quality and accuracy.
Title: Underwater hybrid-kinematics manipulation system for high-precision and high-rigidity manufacturing tasks
This project aims to develop an underwater robotic manipulation system capable of performing various high-rigidity and/or high-precision underwater tasks with acceptable workspace and locomotion capability without a continuous dependency on a host underwater vehicle (ROV). The capability to perform various tasks by simply changing the end-of-arm tool, the ability to work on various sizes and shapes of underwater objects/structures, and the absence of continuous dependency on a host underwater vehicle are among the key capabilities of the proposed robotic platform. Besides, the robotic manipulation system should be lightweight, modular, reconfigurable, and hydro-dynamically efficient. The development of such a robotic system can eliminate the necessity to deploy human divers, particularly in the deep sea, to perform high-demanding tasks.

Climbing Robot – the Cling – Service
This is a service robot that can climb high-rise buildings for cleaning, painting, sand blasting, or inspection. This resulted in Dexter Robotics' spin-off. This has a US patent granted.
Mobile Reconfigurable Parallel Robots – Manufacturing
Have a CNC machine on wheels for field operations. This is a reconfigurable system that can go from 3 to 4 or 5 degrees of freedom per the application requirements. This has a US patent granted.
Collapsible Parallel Robot – Space
Develop a space lander that has a small volume during the space journey and, once deployed, can go to its operational size.
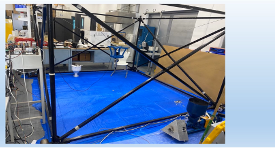
Parallel Cable-Driven Robot – Construction
3D printing of a cable-driven robotic system that can print/construct a multi-story building.
