A team of senior engineering students improved the function and autonomy of robotic arms commonly used for industrial purposes.
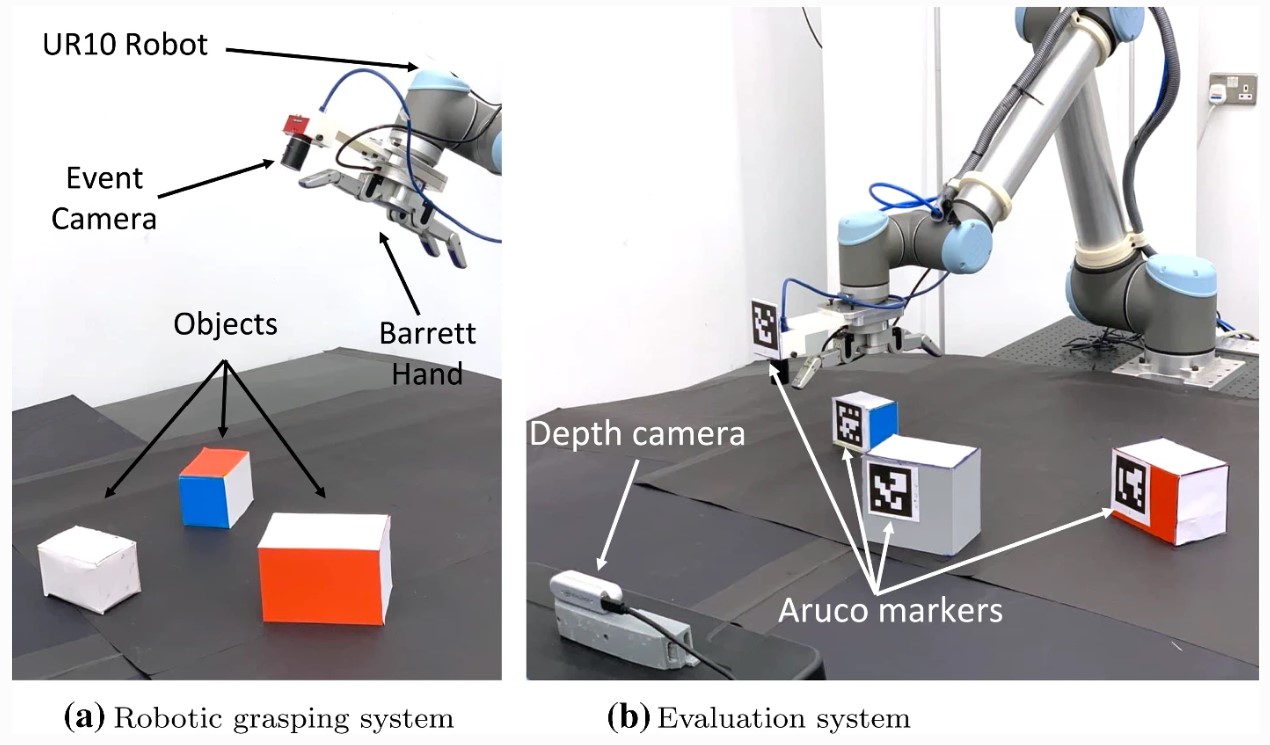
Strata Company provided the students with a UR10 robotic arm, which the students programmed and rigged with sensors to detect and move objects from one place to the other. The robot had to perform the task without any human assistance.
“We used MATLAB to program the robot because it provided us an environment that is easy to use and it can be expressed in mathematical notation. We used Festo sensors to simultaneously map and identify the objects that needed to be manipulated. For instance, the control of the robot arm was used to simulate control of the interface parts from solid work to RoboDK in MATLAB,” said Ayesha Sari Alhameli, Senior Aerospace Engineering student. She was joined by engineering students Ali Sultan Almarzooqi and Amna Abdulla AlMatrooshi.
The students effectively bridged the gap between university project and industrial solutions with real world applications.
Simulink blocks were used to revolute the actuation change of the motion to provide a given input. Furthermore, it was used to create a signal builder while developing the desired angles of the given timeline. Through this, most of the project was theoretical but in various instances, they worked directly with the hardware and components. Simulink played a crucial role in the exportation of CAD assembly models. In light of this, Simulink ran as an entity of MATLAB, or, in some instances as a tool to integrate the interaction with solid work.
Solidwork played a crucial role in visualizing how all the parts fit together. The software we used enabled us to tweak movements for fully autonomous running. The future of the project lies on the success of the theoretical analysis of the project.
“The lessons we learned throughout the project form the basis for troubleshooting and future improvements,” Amna shared.
Erica Solomon
Senior Editor
1 November 2019