- Admissions
- Academics
- Research Office
- Student Life
- News & Events
- Outreach
- About
Dr. Vladimir Parezanović joined Khalifa University in 2017 and is currently an Associate Professor in the Department of Aerospace Engineering. He holds a BSc in Aeronautical Engineering from the University of Belgrade (Serbia) and MSc and PhD degrees in Fluid Mechanics from École Polytechnique – ParisTech (France).
His research focuses on experimental aerodynamics, with particular expertise in wind tunnel testing, turbulent wake dynamics, separated flows, flow control, boundary-layer/shockwave interactions, and active flow control strategies such as fluidic oscillators and plasma actuators. A complementary strand of his work applies machine learning to flow modeling, prediction, and closed-loop control, alongside broader interests in bio-inspired sensing and compressed sensing techniques.
At Khalifa University, Dr. Parezanović leads the development of the Low-Speed Wind Tunnel facility and has secured over USD 1.8M in competitive research funding as principal investigator. He has authored over 20 journal articles, several book chapters, and more than 40 conference papers, and serves on the editorial boards of FME Transactions and TEHNIKA. He is also a technical committee member for the 3AF International Conference on Applied Aerodynamics.
His teaching interests and experience lie in classical mechanics, fluid mechanics, aerodynamics, and experimental methods, complemented by active mentorship of graduate students in aerospace research.
[RIG-2023-024] Drone Aerodynamics and Wake Interactions: Towards Urban Air Mobility
This project addresses the interaction of Uncrewed Aircraft Systems (UAS) with wakes of other similar craft and wakes of large-scale urban objects such as buildings. Contrary to fixed-wing aircraft, there is very little information and no internationally accepted standards concerning the wake characteristics of Vertical Take-Off and Landing (VTOL) craft for cruise, and ascent/descent, and how such wake will affect the dynamics of neighbouring UAS. This is a key challenge to be tackled to ensure safe separation in the foreseen UAS Traffic Management (UTM) system which will have to deal with small VTOL craft operating in a highly constricted urban airspace which is subject to significant environmental flow unsteadiness. This project proposes to explore the aerodynamic phenomena associated with small VTOL flight in urban areas and dense traffic and develop a Separation Assurance and Collision Avoidance (SA/CA) analytical framework (models and associated simulation tools) suitable for VTOL UAS platforms in representative operational conditions. In the future, such an analytical framework could be extended to larger, passenger-carrying VTOL platforms (e.g., air taxis) adopting similar design approaches.
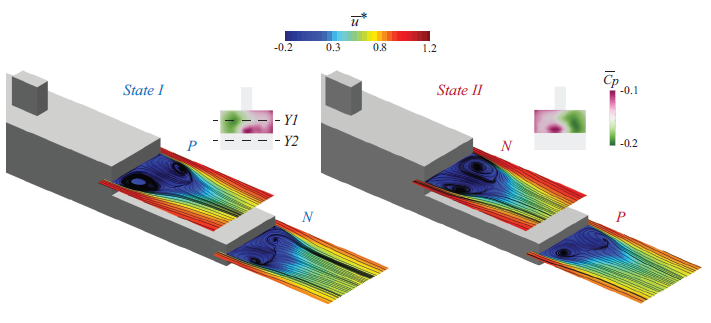
[AARE20-138] Predictive modelling of a turbulent airwake behind a ship’s superstructure using Machine Learning
Modern warships and commercial maritime vessels often employ helicopters for a variety of missions and tasks, such as: reconnaissance, communication, Anti-Submarine Warfare (ASW), light supply transport, emergency medical or VIP transport. Some modern frigates or destroyers even depend solely on helicopters as their ASW component. It is clear in such cases that helicopter operations are crucially important to continue even in severe weather conditions.
One of the major factors contributing to the complexity of helicopter seaborne operations are the unsteady aerodynamic phenomena, arising from the airflow separation from the bluff rear of the ship (hangar deck). These phenomena are responsible for intense turbulent fluctuations and intermittent changes in wind direction near the helipad, leading to an immense increase of the pilot workload at the most crucial moments of the landing procedure or even a complete shutdown of flight deck operations. A key issue here is having knowledge of the instantaneous state of the ship’s airwake at any instance, which is impossible to obtain in practical conditions at sea.
The aim of the current proposal is to develop predictive models for the turbulent wake of the ship’s superstructure using experimental measurements and high-fidelity numerical modelling. Data driven Machine Learning (ML) techniques will be employed to create a model which can (in practical conditions) be used to derive the full airwake information from a limited set of sensors, typically used on real ships.

[RIG-2023-048] Biomimetic-joint-thrust system for underwater propulsion
Jet propulsion is an energy-efficient mechanism employed in traditional aerospace and marine engines, consisting of a fast-moving jet of fluid to generate a propulsive thrust. This mechanism is also at the base of the swimming strategies of several marine species. By pointing the jet outlet indifferent directions and by changing the amount of water drawn, cephalopods (squid or octopi) can modify the direction and speed of their jet propulsion. Inspired by this, we present a soft jet propulsor that can control the outlet position and orientation. The design combines the actuation required for the volume squeezing at the base of the jet propulsion mechanism, with a second actuator to define the orientation of the propulsor. This thruster has the potential to unveil an effective solution for a broad range of tasks currently unsolved, combining the high-speed manoeuvrability of traditional rigid jet propellers with the main advantages of soft robotics.
Aerospace Engineering Department's lead for the KU Low Speed Wind Tunnel facility (SAN Campus).
No vacancies currently.
