- Admissions
- Academics
- Research Office
- Student Life
- News & Events
- Outreach
- About
Dr. Majid Khonji is an Assistant Professor in the Computer Science Department at Khalifa University (KU). He leads the research activities in the Autonomous Vehicle Laboratory (www.avlab.io) at the KU Center for Autonomous Robotic Systems (KUCARS). Additionally, he is a research affiliate with the MIT Computer Science and Artificial Intelligence Laboratory (CSAIL) in the USA. Dr. Khonji earned his MSc degree in Security, Cryptology, and Coding of Information Systems from Ensimag, Grenoble Institute of Technology, France, and completed his Ph.D. in Interdisciplinary Engineering at Masdar Institute, in collaboration with MIT, in 2016.
Prior to his current role, he was a visiting assistant professor at MIT's CSAIL, a senior R&D technologist at Dubai Electricity and Water Authority (DEWA), and an information security researcher at the Emirates Advanced Investment Group (EAIG).
His research interests include Probabilistic Planning, Artificial Intelligence, Combinatorial Optimization, Autonomous Vehicles, and Electric Mobility.
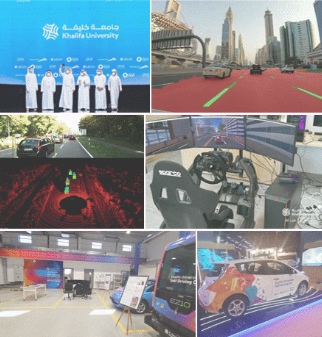
Autonomous Navigation of Self-driving Vehicles in UAE Extreme Operating Conditions
This project focuses on enhancing the navigation capabilities of autonomous vehicles (AVs) in challenging environments, particularly under extreme local conditions such as fog and sandstorms. It emphasizes the integration of various sensors and the application of information and context analysis techniques to improve navigation in visibility-impaired scenarios. The project addresses navigation in uncertain situations, like navigating with outdated or unmapped routes. Developing navigation algorithms based on probabilistic representations is a key component to ensure effective autonomy under these conditions.
A significant aspect of the research involves exploring autonomous navigation with an emphasis on managing environmental uncertainties and minimizing the impact of adverse conditions. The project develops a risk-aware AI system for AV navigation and related tasks, combining AI-based planning algorithms with robot vision techniques. This includes creating perception-based algorithms to predict the future trajectories of environmental agents, integrating an intention recognition system that accounts for uncertainty. Diverging from traditional methods, this innovative approach uses a robust optimization framework designed to operate with noisy data and to prepare for worst-case scenarios.

MSAP: Multi-robot Symbiotic Autonomy Platform for Next-generation Cities and Smart Communities
Recent years have been witnessing a pervasive influx of novel autonomous technologies and concepts, such as self-driving cars, drones, legged/humanoid robots, flying cars, to name a few. Gradually but steadily, these paradigms are poised to have a revolutionary impact on society and industry over the coming years. To this end, a crucial challenge lies in developing an operating system (OS) capable of consolidating the collective autonomous functionality and intelligence of these heterogeneous robotic agents through their symbiosis and collaboration. The synergy of these autonomous agents would allow overcoming their individual inherent limitations, thereby enabling the overall system to achieve more reliable and uninterrupted operation, increased efficiency, broader functionality, and enhanced usability. Having such a modular and multi-modal system capable of providing services in indoor and outdoor environments demands a whole new degree of autonomy and entails a new class of optimization and control problems as well as novel algorithmic challenges. One prominent issue in control of such complex multi-agent systems pertains to capturing system-wise uncertainties. In this project, reasoning under both aleatoric (statistical) and epistemic uncertainty, we seek to design and deploy a proof-of-concept Multi-robot Symbiotic Autonomy Platform (MSAP) and synthesize provably efficient controllers and algorithms for safety-critical applications in transportation and last-mile logistics.
Visit www.avlab.io for more updates.
We are actively seeking top-notch candidates in the field of autonomous vehicles, including aerial and legged robots:
Visit www.avlab.io for more updates.
