- Admissions
- Academics
- Research Office
- Student Life
- News & Events
- Outreach
- About
Dr. Alessandro Gardi specializes in aerospace cyber-physical systems (UAV, avionics/ATM systems and satellites). His expertise is in multi-objective optimization and physics-informed AI/metaheuristics for air and space platform design and trajectory/mission management. Dr Gardi has also contributed to evolving aerospace systems and software engineering methodologies to exploit Internet of Things (IoT) technology as well as health monitoring and data integrity/cyber-resilience functionalities to enable autonomous vehicle operation for extended periods of time even in degraded conditions.
To date, Dr Gardi has supervised more than 80 undergraduate and 20 postgraduate final year projects and 16 PhD/MRes candidates. He has also been a partner/senior investigator in more than 10 research projects funded by industry and government, and has produced over 200 refereed scientific publications, securing more than 4000 citations and an overall h-index of 40.
Dr Gardi is an Adjunct Senior Fellow at RMIT University (Australia) and was appointed PhD examiner for top international universities. He serves as Editor for several journals including the Aeronautical Journal (RAeS), Drone Systems and Applications (CSP), Journal of Testing and Evaluation (ASTM), Robotics (MDPI).
Employment history:
• 2022-current, Assistant Professor, Department of Aerospace Engineering, Khalifa University, UAE.
• 2019-2021, Senior Research and Teaching Fellow, RMIT University, Australia.
• 2017–2019, THALES Research and Teaching Fellow, RMIT University, Australia.
Hybrid Multi-Objective Optimization Methods for Aerospace GNC Systems
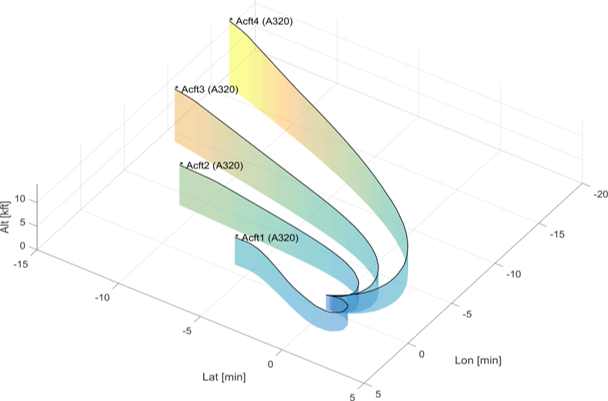
This project aims to develop new computationally-efficient algorithms to determine globally optimal solutions for various aerospace trajectory planning and vehicle/system design tasks formulated as multi-objective and multi-phase problems. The algorithms shall capitalize on the complementary advantages of highly accurate and computationally efficient gradient-based methods on one side and globally optimal metaheuristic methods on the other side. The project focusses on contemporary aerospace vehicles in representative mission scenarios around the United Arab Emirates (UAE). The primary target for implementation of the developed methods are the Guidance, Navigation and Control (GNC) systems of these vehicles. The implementation in a prototype 4D trajectory Planning and Negotiation/Validation (4-PNV) system for strategic and tactical online trajectory planning in shared airspace is also pursued, particularly tackling the challenges airising in UAS Traffic Management (UTM) and Urban Air Mobility (UAM) scenarios.
Project partners: TII, RMIT University (Australia), University of Bologna
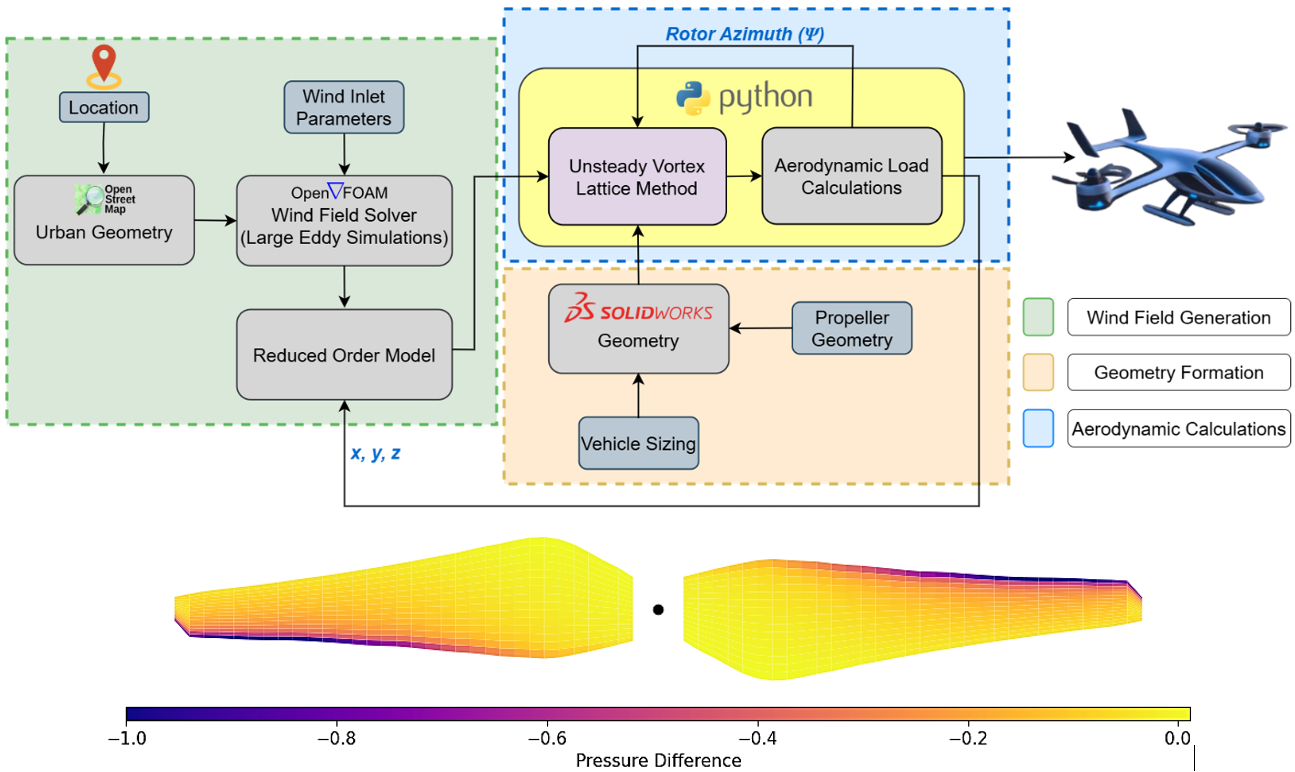
Wake and Atmospheric Boundary Layer Turbulence Modelling and Avoidance for Operational Safety in Urban Air Mobility
The anticipated growth of Uncrewed Aircraft Systems (UAS) and Urban Air Mobility (UAM) is introducing a variety of challenges which will have to be addressed to ensure operational safety of these emerging vehicles in and around densely built environments, particularly when the transportation of passengers is involved. The wake of other UAM vehicles and the gusts and turbulence occurring due to the flow interactions with buildings pose significant hazards, particularly for smaller vehicles with limited manoeuvrability. In order to design Guidance, Navigation and Control (GNC) and Sense-and-Avoid (SAA) systems capable of avoiding these hazards, it is essential to characterize these phenomena and develop suitable mathematical models.
This project is part of a multi-university collaboration and aims to:
Project PI: Dr Vladimir Parezanovic (KU Aerospace)
Project partners: University of Liverpool (UK)
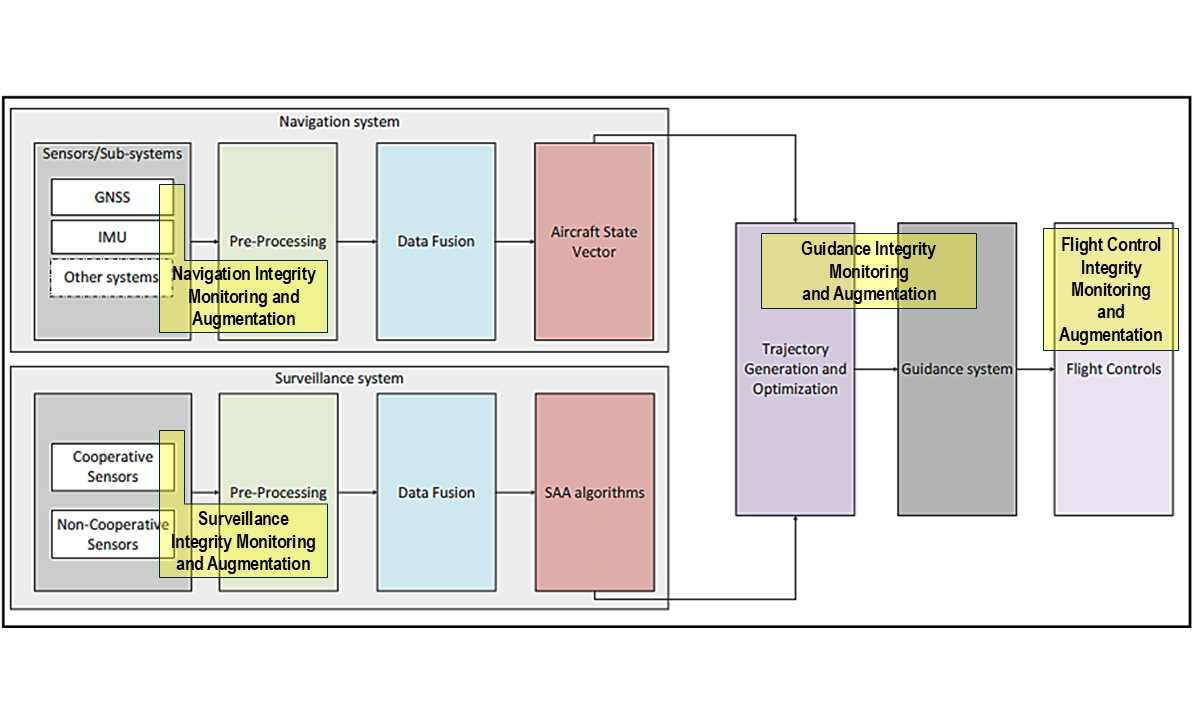
Intelligent Health Management and Trusted Autonomy in Aerospace Vehicles
This project aims to develop Intelligent Health and Mission Management (IHMM) systems exploiting digital twin, explainable/certifiable Artificial Intelligence (AI) and suitable onboard sensor network technologies to ensure operational safety in increasingly autonomous aerospace vehicles such as Uncrewed Aircraft Systems (UAS) and intelligent satellite systems. In these vehicles, IHMM systems are expected to progressively replace the conventional flight crew in detecting the onset of anomalies and in planning and enacting reversionary actions, as without these critical IHMM capabilities an autonomous vehicle would be prone to catastrophic failures. The project will focus on the integrity of the most important safety-critical systems in contemporary aerospace vehicles, such as: UAS sense-and-avoid systems, electric power and propulsion systems and flight control systems for electric Vertical Take-Off and Landing (eVTOL) vehicles and intelligent satellite systems. The developed IHMM system prototype will be experimentally verified in laboratory and ground/flight tests exploiting the available university facilities.
Postdoctoral positions: no current vacancies
Postgraduate positions: currently accepting applicants on the following MSc/PhD projects:
Flight Dynamics, Stability and Control
- Flight Dynamics Characterization and GNC System Design for VTOL/Cruise and Vectored Thrust Aircraft in Urban Air Mobility
- Wake and Atmospheric Boundary Layer Turbulence Modelling and Avoidance for Operational Safety in Urban Air Mobility (description available above)
- High-Integrity GNC Systems for Trusted Autonomous Aerospace Vehicles
Multidisciplinary and Multi-Objective Optimization
- Hybrid Multi-Objective Optimization Methods for Aerospace GNC Systems (description available above)
- Physics-Informed AI Modelling and Mitigation of Aviation Climate Impacts
