- Admissions
- Academics
- Research Office
- Student Life
- News & Events
- Outreach
- About
Prof. Igor Boiko’s main research interests are in the area of control theory and process control, robotic and power applications, with focus on the theory of nonlinear and particularly discontinuous control systems. He has developed such theories as the locus of a perturbed relay system (LPRS) method, the paradigm of process-specific optimal non-parametric tuning of PID controllers and coordinated test and tuning, the concept of phase deficit, the dynamic harmonic balance principle, the notion of fractal dynamics, which are recognized as important contributions to the control theory.
Dr. Boiko has an extensive industrial experience in the petro-chemical industry in the area of automation, distributed control systems, and process control. He worked in various engineering capacities for Honeywell, SNC Lavalin, ChevronTexaco, and Syncrude Canada and developed a number of innovative control applications successfully used in the industry. He also led the design of control systems on a few Canadian mega-projects.
Dr. Boiko has authored four books, a number of book chapters, articles in refereed journals and conference proceedings. He holds four US patents in the area of industrial control. He was included in the Stanford-Elsevier 2019, 2020 and 2021 lists of top 2{0961db0d5220b4955a3f07ef234db6dc96890fe8a6be6f8a7c66584c2fe2ed1b} world researchers.
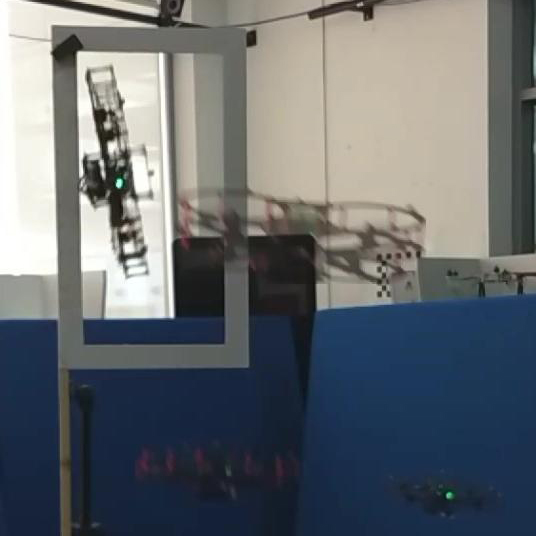
Design of Generalized System Identification Policy for UAV Trajectory Tracking in Uncertain Environments using Reinforcement Learning
This research is conducted in joint leadership with Dr. Yahya Zweiri (PI) from KU Aerospace Engineering. This project pursues development of an approach that leverages AI capability for UAVs to characterize their own physical dynamics safely during flight operation. The proposed approach brings the following new technological features:
1. A UAV can take-off and identify its own physical parameters without any prior knowledge of its own dynamics.
2. The identified UAV parameters are very accurate.
3. The identified UAV parameters are obtained quickly (i.e. in real-time).
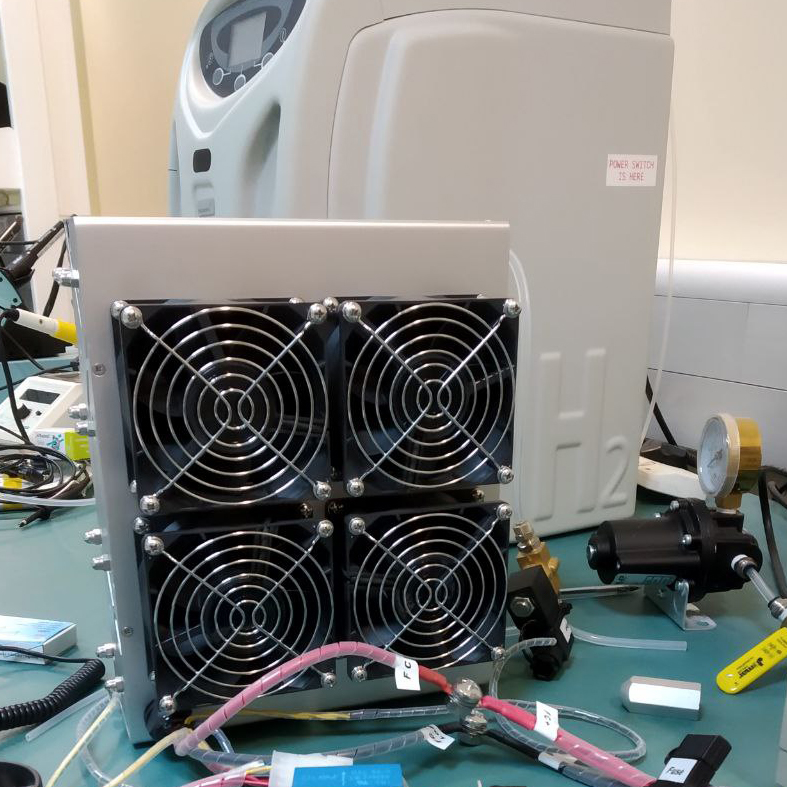
Low Temperature PEM Fuel Cell Modeling and Control for Mobile Applications
This research is conducted in joint leadership with Prof. Ahmed Al-Durra (co-PI). The proposed project is aimed at solving a few important problems related to control of PEM fuel cell system. The three objectives pursued by the current projects are as follows.
• Development of the detailed non-linear model of the PEM fuel cell, particularly using the approaches to modeling of complex electrical and thermos-dynamic components developed by the process control group at of the Petroleum Institute, including the models of auxiliary components.
• Development and design of the model-based control of PEMFC system aimed at simultaneous optimization of efficiency and safe operational modes for the fuel cell and its auxiliary components under parametric uncertainty.
• Implementation of the complete system and experimental testing on a mobile application.
