About Us
People
Research
Sponsors
Facilities
Publications & Patents
News
About Us
People
Research
Sponsors
Facilities
Publications & Patents
News
About Us
People
Research
Sponsors
Facilities
Publications & Patents
News
KU Center for Autonomous Robotic Systems
Facilities
Marine Robotics (D00058, a pool which will have wave and stream generation capabilities) – Theme 3 Lab
View
Autonomous Cars (KU SAN Campus) – Theme 1 Lab
View
Computer Vision (L03029) – Theme 1 Lab
View
Aerial Robotics (an outdoor area and an indoor lab-C00060) – Theme 2
View
Lab Manufacturing robotics (ARIC Labs) – Theme 4 Lab
View
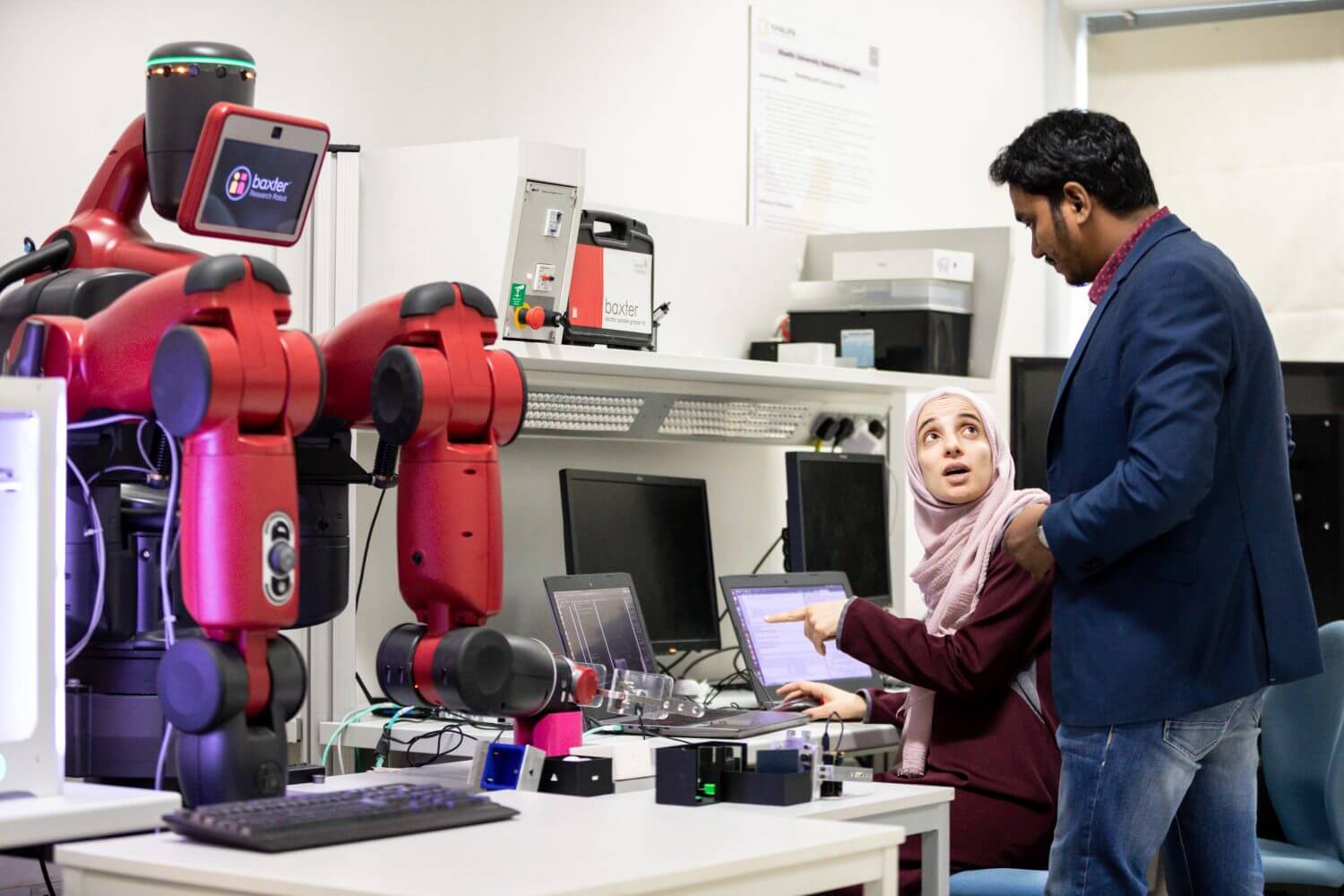
Industrial Robotics (L010129) – Theme 4 Lab
View