Researchers at Khalifa University have developed a new toolbox for modeling soft robotics using algorithms that are much less computationally expensive than existing approaches.
Dr. Federico Renda, Associate Professor of Mechanical Engineering, Ikhlas Ben Hmida, Research Associate, and Dr. Anup Teejo Mathew, Postdoctoral Fellow, designed the toolbox to enable the static and dynamic analysis of soft, rigid, and hybrid robotic systems. It can be accessed using MATLAB, a programming platform for engineers and scientists to analyze and design systems and products.
“In the past, most robots were confined to the factory floor, often at a safe distance from workers and fragile objects,” Dr. Renda said. “Today, a growing number of robotic applications involve operating in challenging environments, where components must interact closely with delicate matter. Medical robots, for example, encounter human tissue, underwater robots handle marine life, and agricultural robots touch produce.”
Soft robots are significantly more adept at handling these scenarios than their rigid counterparts. They are highly deformable, made primarily of soft, compliant materials like elastomers. They are reconfigurable robots, able to dynamically adapt their structures to accomplish their tasks in increasingly diverse environments.
As an example, the research team has developed a flagellum-inspired soft underwater propulsor — an underwater soft robot. The robots are designed as a passive system, capable of moving in a range of geometrical configurations from the interaction with the surrounding fluid. This is a simple actuation mechanism inspired by flagellated microorganisms in nature, but it wasn’t simple to bring this type of soft robot to life.
Designing this technology means overcoming unique hurdles as robots with infinite degrees of freedom can prove difficult to model. Existing toolboxes are theoretically simple but computationally intensive and suffice for general purpose simulation and are too slow for practical use in analysis and control design.
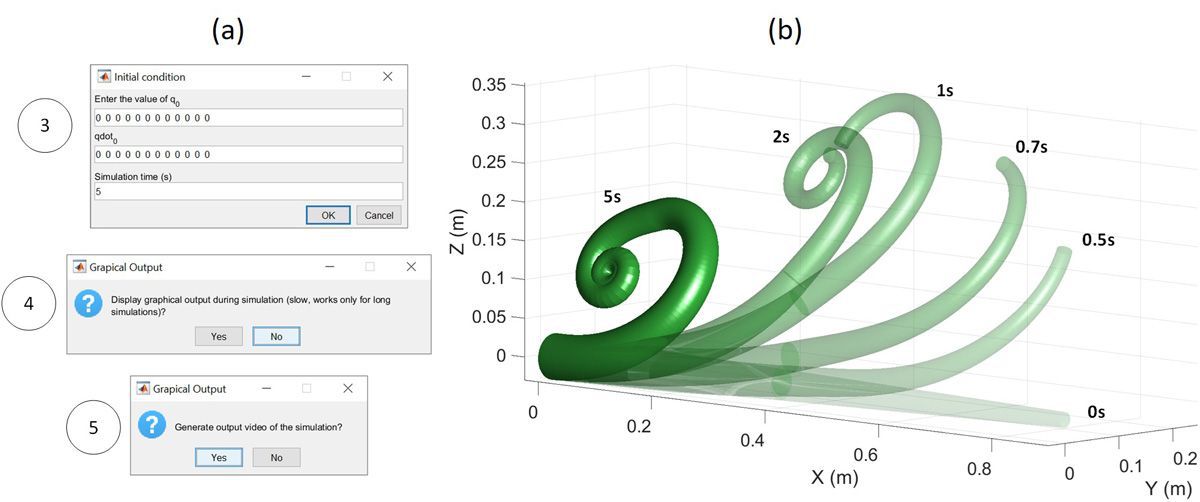
The research team developed SoRoSim, a toolbox using three MATLAB elements to represent links, linkages, and twist. The link enables the user to define soft or rigid links with a variety of joint types; linkages let the user assemble multiple links into chains and define external forces, such as gravity, as well as actuation inputs; and twist allows users to specify the degrees of freedom for joints.
“Taking this approach enabled us to easily enhance and add capabilities to these elements over time without having to refactor other aspects of the toolbox,” Dr. Renda said. “As our research progressed, we added more advanced computational methods and support for modeling dynamics all within the existing MATLAB framework.”
Faster-than-real-time simulation means SoRoSim can be used to address real-world control design and optimization problems.
“One of the main advantages of developing SoRoSim in MATLAB — aside from the popularity of MATLAB among the robotics research community — is the ability to solve complex challenges by combining SoRoSim with other MATLAB toolboxes,” Dr. Renda said. “Our future development efforts will be guided by feedback we receive from roboticists and researchers using SoRoSim.”
Jade Sterling
Science Writer
7 February 2023