Overview
INFRASTUCTURE
PEOPLE
Overview
The field of Dynamics, Control, and Automation deals with fundamental problems in mechanical engineering. It concerns the modeling and analysis of the dynamics of mechanical systems and processes and pursues the development of design methodologies for the control and automation of their operations. Covered topics include dynamic modeling, mechanism synthesis, linear and nonlinear control theories, mechatronics, and intelligent machines design. Dynamics, Control and Automation knowledge founds applications in many engineering areas and is applied to almost any modern device including industrial machines, personal device, biomedical tools, robotics systems, aerospace systems, etc. Research in the field has been heavily involved with classical mechanics, signal processing, mathematics, computer science, and address specific challenges in other engineering disciplines, covering almost all majors at Khalifa University. The faculty of the Department of Mechanical Engineering performs research that responds to these challenges building on their considerable expertise in a wide spectrum of areas of science and technology that include:
- Autonomous control of mobile platforms
- Mechatronics and Robotic Systems
- Micro-electromechanical Systems
- Multi-scale analysis of dynamical systems
- Simultaneous Localization and Mapping (SLAM)
- Sensing Technology and Integrated Sensors
- Smart Structures and Devices
In particular, Robotics is rapidly expanding into human environments and vigorously engaged in its new challenges. Interacting with, assisting, serving, and exploring with humans, the emerging robots will increasingly touch people and their lives. Safety during human robot interaction is still the world level open problem and challenging.
The departmental faculty is in close collaboration with colleagues researching related fields through the Dynamics Control and Automation Research Thrust at Khalifa University. The key departmental research themes include:
- Autonomous mobile robots (KUCARS).
- Compliant Co-Robot for Safe Human-Robot Collaboration in Complex Industrial Tasks (KUCARS).
- Continuous soft robot dynamics and control (KUCARS, HEIC).
- Corrosion detection sensors for oil and gas pipelines (Mechatronics Lab (ML)).
- Design and development of novel smart assistive exoskeletons for the rehabilitation of stroke patients (HEIC).
- Development of novel MEMS accelerometer, gyroscope, and magnetometer for miniaturized space attitude Control system (MEMS Dynamics Group under MEMS Shared Lab).
- Fiber-optics based sensors (Mechatronics Lab (ML)).
- Multi-robot systems for smart Pipeline inspection (Smart Sensing Systems (SSS)).
- Magneto-rheological fluids and devices (Mechatronics Lab (ML)).
- Passive, semi-active, and active hydraulic engine mounts (Mechatronics Lab (ML)).
- Industrial Applications Robotics Lab
- Soft robotics, underwater robotics and geometric mechanics
INFRASTUCTURE
Lead: Dr. Lakmal Seneviratne
Major Equipment:
- Baxter dual arm system
- Optitrack Tracking systems
- Nao Humanoid Robots
- 3D printers



Soft Robotics and Compliant Manipulation Lab
Leads: Dr. Federico Renda & Dr. Irfan Hussain
Major Equipment:
- Baxter dual arm system
- 3 axis CNC Router
- 3D printers


Mechatronics Lab (ML)
Lead: Dr. Nader Vahdati
Major Equipment:
- National Instrument PXIe-4844 Optical Sensor 4-channel interrogator
- Luna Inc. OBR4600 Optical Backscatter Reflectometer (interrogator)
- Portable Analyzer FFT Real-time (8+2) channels
- OR35, from Oros
- Two 4-channel DT9837 Series Dynamic Signal Analyzers
- Gauss meter
- Oscilloscopes
- Labview
- Multimeters


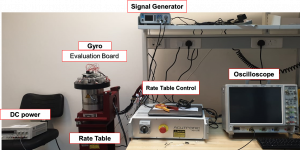
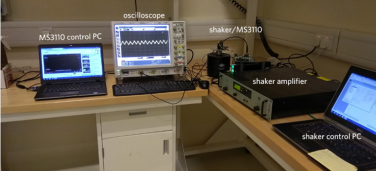
MEMS Dynamics Group under MEMS Shared Lab
Lead: Dr. Daniel Choi
Major Equipment:
- Rate table with controller
- Signal generator
- Impedance analyzer
- Shaker with amplifier and controller
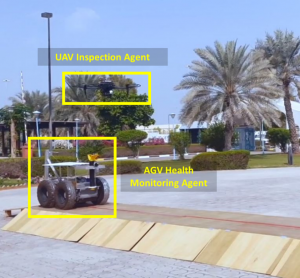
Smart Sensing Systems (SSS)
Lead: Dr. Hamad Karki
Major Equipment:
- Matrice 100
- DJI Matrice 210 RTK-g, Jackel AGV robot
- Husky Robot clearpath
- UR 5 Manipulator Universal Robots
- Pelican Drone
- Segway AUV robot
- Davinci 3D printer
PEOPLE