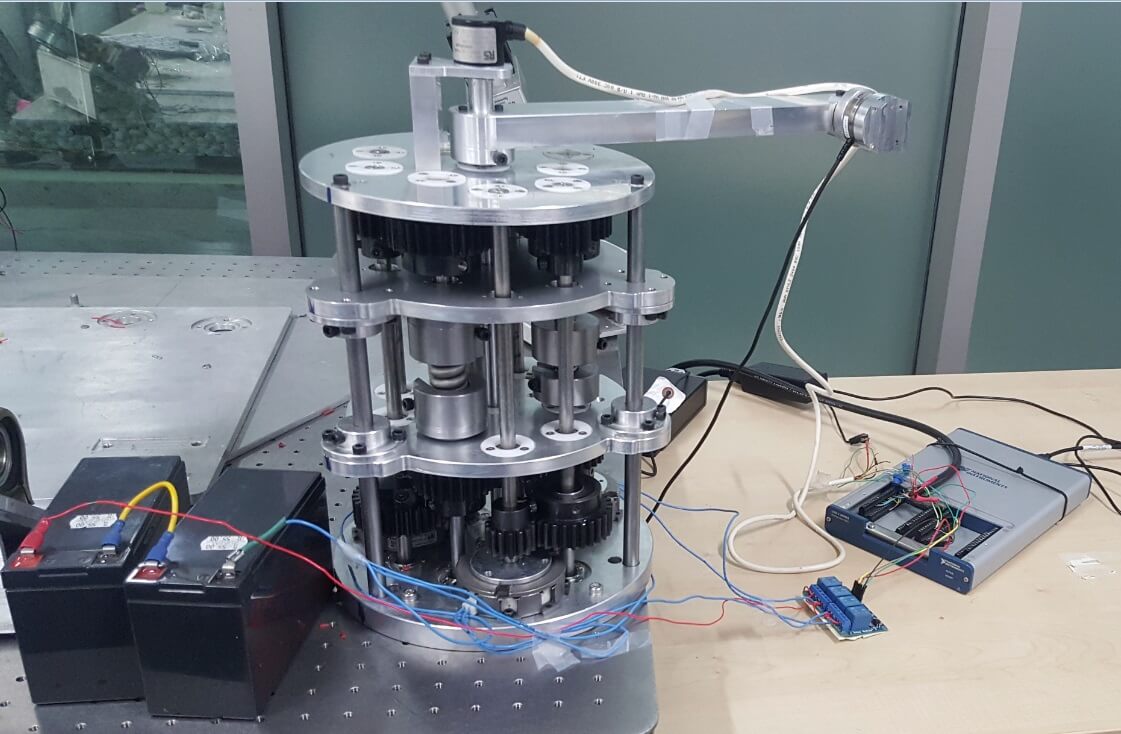
The testbed of a new compliant joint made with springs to reduce impact in interaction
As we stand on the brink of the 4th Industrial Revolution, technological innovations such as the variable stiffness actuators developed by Dr. Dongming Gan bring us ever closer to safe human-robotic interaction.
A team of researchers at the KU Center for Autonomous Robotic Systems (KUCARS) are creating robots that can co-exist and co-operate with humans in a safe and efficient way. Their work has so far produced five papers and two patent applications for robots offering a wide range of applications in many different fields, including medicine and industry.
Although up to 90 percent of manufacturing tasks nowadays are yet to be fully automated, automated manufacturing is the undisputed future trend of modern industry. Flexible and intelligent manufacturing is the aim as conventional procedures of production are replaced and the separation of workspaces between robots and human workers is removed.
Human-robot collaboration (HRC) can contribute to the development of the factories of the 4th Industrial Revolution, where humans and robots will work and carry out tasks together. Having robots undertake repetitive or potentially risky tasks can free humans to focus on operations with added value or that demand higher levels of dexterity. A collaborative environment in which humans and robots can work side by side and share tasks in an open environment is thus a worthy goal.
“With rising labor costs and customer requirements changing frequently, robotics technology has been widely explored and is believed to be a promising solution to reducing costs and making the manufacturing system flexible enough to adapt to real-world variability,” said Dr. Dongming Gan, Assistant Professor in the Department of Mechanical Engineering.
However, this future involves breaking with established safety procedures as direct interaction with robots in industry bring the rise of new risks of accidents. To facilitate this vision of effective collaborative work between a human worker and an industrial robot, previously existing barriers need to be eliminated and new types of safety systems introduced.
Currently, to interact safely and productively with humans, robots must be flexible, robust, precise, adaptive and compliant. But our robot counterparts today lack the fine motor skills, unique flexibility and compliance to work efficiently—in other words, they are too rigid, too clumsy and struggle to adapt.
But robots can also be tough, fast and accurate—in their own space. They typically have powerful, heavyweight automated arms that perform tasks such as welding, painting or assembly within the confines of an enclosure.
Since their introduction, industrial robots have been designed to operate at a distance from workers, mostly due to the variety of hazards posed and their lack of the sensory capabilities necessary to detect nearby humans. Most of the regulations and safety strategies in place around the world depend on keeping workers at a distance during operation, either through physical barriers or sensors that shut machines down when people approach too closely.
While the safety of humans around the robot must be guaranteed during the execution of a task, physical safeguards may not always be practical. The alternatives include power or force limiting, robotic awareness of the humans around it, and effective bidirectional human-robot communication.
“Since humans are still the key members in the manufacturing process and environment, co-working scenarios are common with robots assisting, collaborating, and independently working with humans,” added Dr. Gan. “Our project aims to develop a new compliant robotic manipulator targeting safe human-robot collaboration in automated manufacturing.
“The possible advantages that can be obtained with compliant actuators are very well known, but most of the robots in industry still lack these features.”
In industrial robotics, the term ‘compliance’ refers to flexibility and suppleness. While a stiff actuator is able to move to a specific position or to track a predefined trajectory, a compliant actuator will allow deviations from its own equilibrium position, depending on the applied external force. The equilibrium position is defined as the position of the actuator where it generates zero force or torque.
Inspired by human motion and learning behavior, similarly versatile and constantly adaptive movements and skills endow robots with singularly human-like motor dynamics and learning. The challenge is to integrate novel biological notions, advanced learning algorithms, and cutting-edge compliant mechanics in the design of working robots with an unprecedented aptitude for integrating in our environments.
“Bio-inspired robotics design results in compliant robotic systems with improved natural dynamics and kinematics,” added Dr. Gan. “Intrinsic compliance is one of the possible solutions towards robust and safe HRI.”
The conventional rule of thumb in robotic design focuses on the interface between motor and loads, which is “as stiff as possible” because stiffness improves precision, stability, and bandwidth of position control. But precise tracking of trajectory isn’t always the optimal strategy for robots that need to interact with humans. Good shock tolerance, lower reflected inertia, more accurate and stable force control, less damage during inadvertent contact, and the potential for energy storage are all elements of compliant actuation.
“Our project focuses on safe human-robot interaction in manufacturing based on novel mechanical system design, advanced sensing technology, and intelligent control algorithms,” explained Dr. Gan. “We are currently designing a new compliant joint and this will be the key component in safe interaction by employing compliance of springs to reduce impact in interaction.”

The KUCARS team approach involved a lever mechanism and a new method of stiffness variation achieved through the addition and subtraction of elastic elements in the actuator mechanism. The elastic elements can be arranged in series or in parallel and this series-parallel arrangement is efficient in terms of both energy and peak torque.
“Based on the concept of series-parallel elastic actuators, we first proposed a passive version of the discrete variable stiffness actuator,” said Dr. Gan. “In our previous work, we mainly focused on the passive versions and in this regard, we proposed various design topologies and optimized their design specifications according to the intended applications. The key motivation behind our design topology is the need for instantaneous switching between stiffness levels for different applications.
“Now that passive actuators have been successfully demonstrated to change their stiffness using our proposed topologies, we are in the process of developing a compact and active version with a motor. The basic design principle is based on a stiffness varying mechanism comprising a motor, three inline clutches, and three torsional springs with stiffness values connected to the load shaft and the motor shaft through two planetary sun gear trains..”
“Theoretically, the softer the joint is, the safer the robot will be. However, compliant serial manipulators are difficult to control and there is a trade-off to optimize stiffness. Future work will take control analysis to reach the optimized compliant setting for real time applications.”
Jade Sterling
News and Features Writer
16 October 2019